Decoder de locomotoras
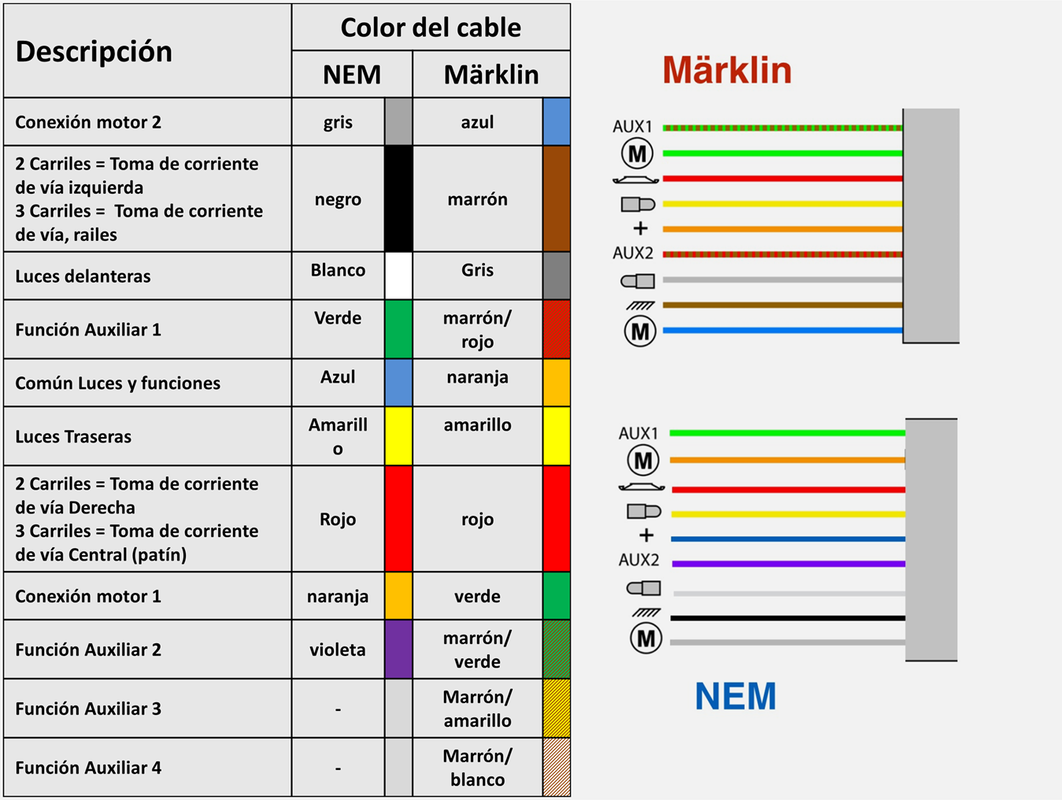
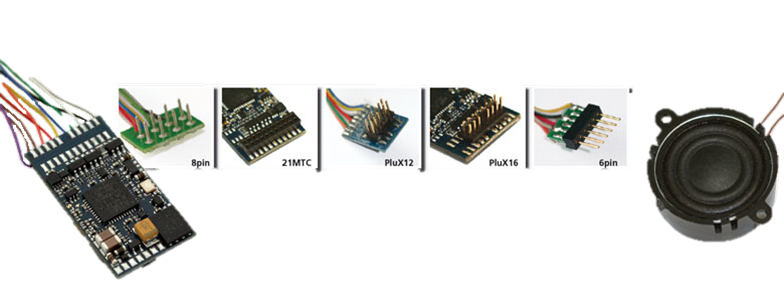
El decoder de locomotoras es el encargado de leer e interpretar los impulsos que detecta en la corriente de la vía. Estos impulsos son generados por la central digital, y convertirlos electrónicamente por el decoder de locomotora en operaciones tales como regular la velocidad del motor e incluso activar funciones de luces de acuerdo al sentido de la marcha u otras funciones auxiliares como fumígenos, enganches telex, etc. Los impulsos generados por la central se envían de manera ordenada para poder ser traducidos por los decoders. El lenguaje de estos impulsos se llama protocolo de comunicación. Cada decoder tiene una dirección digital que puede reprogramarse y la información que envía la central, a través de la vía, va precedida de esa dirección para que cada decoder pueda identificar qué paquete de datos le corresponde a él y cual le corresponde a otro decoder.
Märklin ha usado los protocolos Motorola I, Motorola II y MFX, mientras que otros fabricantes han usado otros como el DCC, selectrix, etc. Los últimos modelos de decoders con protocolo DCC a veces utilizan un segundo protocolo de comunicación bidireccional denominado Rail-Com. Normalmente un Decoder se fabrica para un protocolo concreto pero algunos fabricantes comercializan decoders multiprotocolo, es decir que son capaces de leer cualquiera de estos protocolos, lo que los hace muy versátiles.
Märklin ha usado los protocolos Motorola I, Motorola II y MFX, mientras que otros fabricantes han usado otros como el DCC, selectrix, etc. Los últimos modelos de decoders con protocolo DCC a veces utilizan un segundo protocolo de comunicación bidireccional denominado Rail-Com. Normalmente un Decoder se fabrica para un protocolo concreto pero algunos fabricantes comercializan decoders multiprotocolo, es decir que son capaces de leer cualquiera de estos protocolos, lo que los hace muy versátiles.
Cómo funciona un decoder
Cada decoder dispone de una dirección digital propia que lo identifica unívocamente. Esta dirección se puede asignar y modificar a voluntad con la precaución de no tener varias locomotoras con sus decoder con la misma dirección.
La central digital o el dispositivo de control digital envía los comandos de control al decoder a través de la corriente de la vía en forma de paquetes de pulsos. Estos paquetes incorporan la dirección digital para que cada decoder solo atienda a los comandos que corresponden a su dirección. Además estos paquetes de datos en forma de pulsos, pueden ser enviados en uno o varios protocolos de comunicación distintos según la central que utilicemos y como la hayamos configurado. En función de lo sofisticado que sea el decoder, éste podrá interpretar una mayor variedad de comandos.
La comunicación central-decoder, es unidireccional salvo en los decoders más modernos como el MFX o MFX+ de Märklin o los decoder DCC con Rail-Com y Rail-com plus incorporado. Los decoder unidireccionales pueden recibir los comandos de la central pero no pueden reenviar ninguna información de vuelta ni siquiera para confirmar que la información les ha llegado correctamente. La bidireccionalidad permite que el decoder informe a la central de todos sus valores internos, lo que tiene ciertas ventajas sobre los decoder unidireccionales y que merecerá un capítulo aparte más adelante.
Cada decoder dispone de una dirección digital propia que lo identifica unívocamente. Esta dirección se puede asignar y modificar a voluntad con la precaución de no tener varias locomotoras con sus decoder con la misma dirección.
La central digital o el dispositivo de control digital envía los comandos de control al decoder a través de la corriente de la vía en forma de paquetes de pulsos. Estos paquetes incorporan la dirección digital para que cada decoder solo atienda a los comandos que corresponden a su dirección. Además estos paquetes de datos en forma de pulsos, pueden ser enviados en uno o varios protocolos de comunicación distintos según la central que utilicemos y como la hayamos configurado. En función de lo sofisticado que sea el decoder, éste podrá interpretar una mayor variedad de comandos.
La comunicación central-decoder, es unidireccional salvo en los decoders más modernos como el MFX o MFX+ de Märklin o los decoder DCC con Rail-Com y Rail-com plus incorporado. Los decoder unidireccionales pueden recibir los comandos de la central pero no pueden reenviar ninguna información de vuelta ni siquiera para confirmar que la información les ha llegado correctamente. La bidireccionalidad permite que el decoder informe a la central de todos sus valores internos, lo que tiene ciertas ventajas sobre los decoder unidireccionales y que merecerá un capítulo aparte más adelante.
Conexión de los decoder de locomotora.
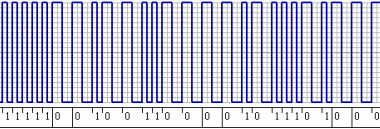
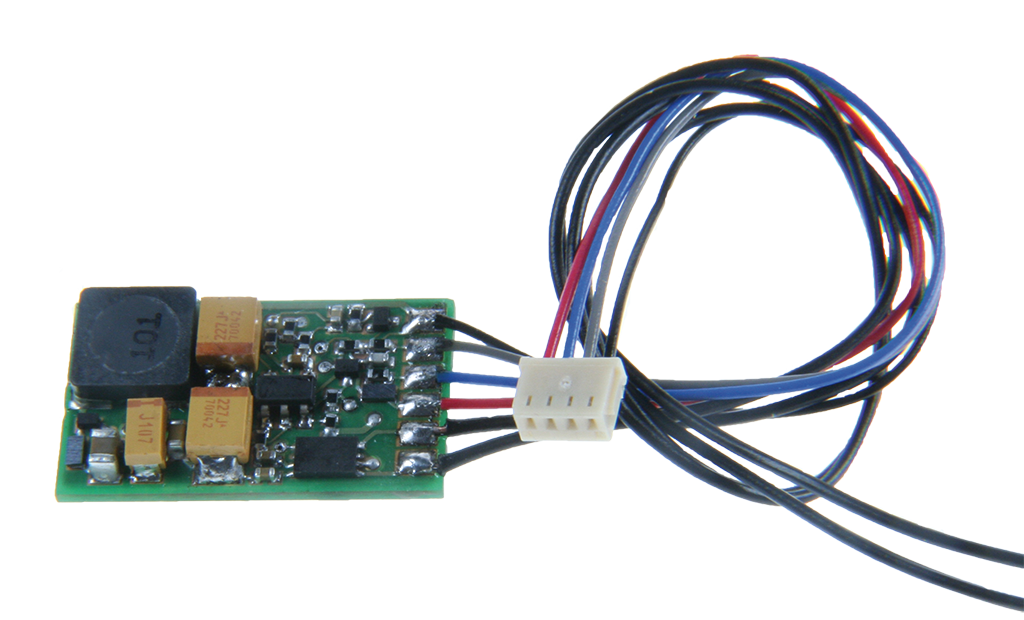
Ejemplo de conexión decoder ESU Lokpilot (cableado NEM)
|
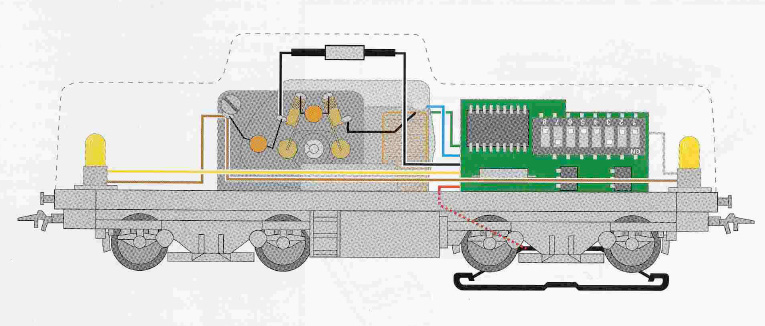
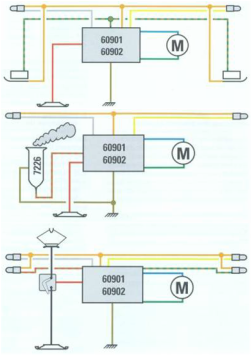
Los decoder toman la corriente de la vía a través del patín central y de las ruedas en el caso del sistema 3C o sólo por las ruedas en el caso del sistema 2C. Las salidas del decoder son para la alimentación del motor, luces y funciones auxiliares. Dependiendo del decoder éste dispondrá de más o menos salidas.
|
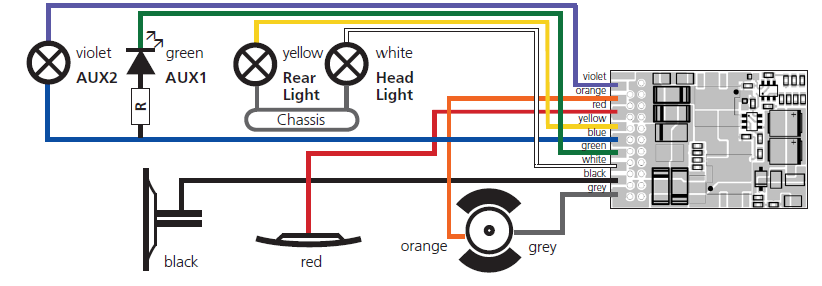
Código de colores (cableado)
Tipos de cableado: NEM vs Märklin
|
Hay que tener cuidado porque no todos los decoders usan el mismo código de colores. Marklin usa los suyos propios mientras que ESU y otros fabricantes usan el estandar NEM.
Pinchar en las imagenes para ampliar 
Conector NEM: disposición del cableado
|
Programación de los decoders
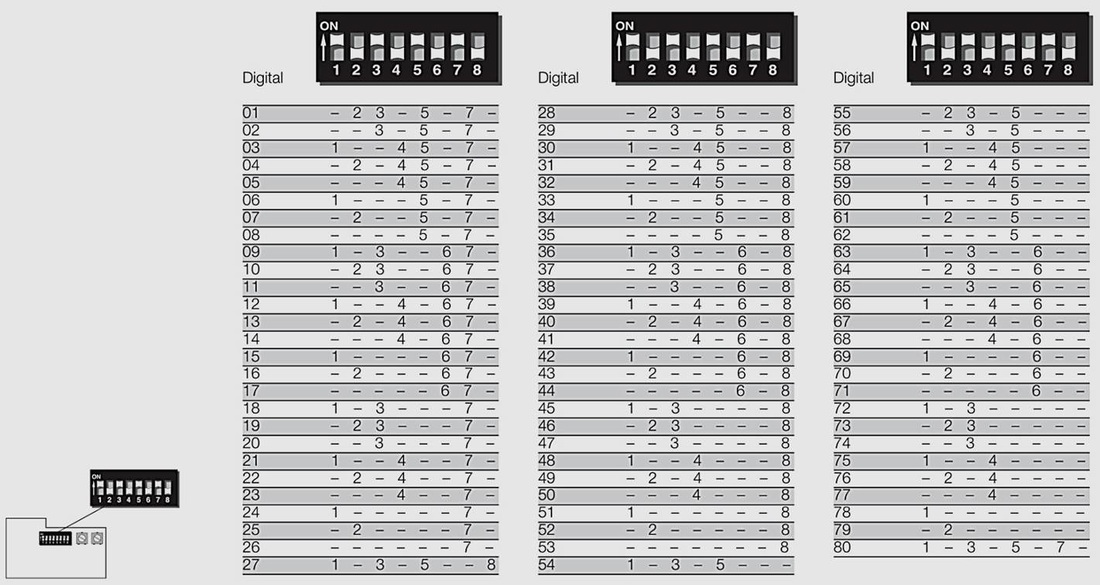
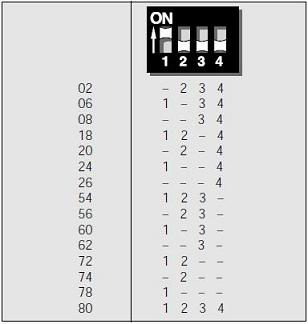
Los antiguos decoders Märklin DELTA y los decoder DIGITAL de hasta 80 direcciones digitales, incorporaban unos microinterruptores denominados "piano de ratón" que sirven para programar la dirección digital del decoder. En la tabla adjunta se puede identificar la posición de cada bit en dicho teclado para cada una de las 80 direcciones digitales en caso de Dip Switchs de 8 posiciones o 15 direcciones en caso de los Dip Switch de 4 posiciones.
Los antiguos decoders Märklin DELTA y los decoder DIGITAL de hasta 80 direcciones digitales, incorporaban unos microinterruptores denominados "piano de ratón" que sirven para programar la dirección digital del decoder. En la tabla adjunta se puede identificar la posición de cada bit en dicho teclado para cada una de las 80 direcciones digitales en caso de Dip Switchs de 8 posiciones o 15 direcciones en caso de los Dip Switch de 4 posiciones.
|
Tabla de 80 direcciones digitales para Dip Switch de 8 posiciones
|
Tabla de direcciones Delta para Dip Switch de 4 posiciones
|
En los modernos decoders ya no se usa el Dip Switch o "piano de ratón" y la programación tanto de la dirección digital como de todas las funciones posibles se realiza modificando los valores de determinadas posiciones de memoria en el decodificador, denominadas CV. Dichos valores se modifican mediante comandos especiales de programación que se pueden enviar desde la central digital u otros dispositivos de control. Al final de esta página encontrareis más información sobre la programación digital por CV's y sobre el ajuste fino de los decoder para mejorar la marcha de los motores.
Decoder más utilizados por Märklin:
DELTA
|
Delta 3301
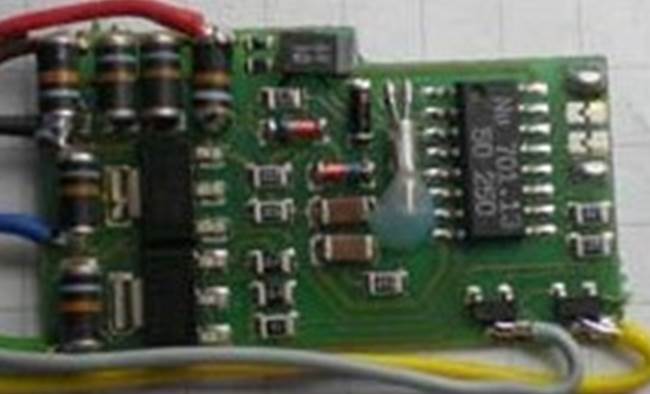
Uno de los primeros descodificadores de Märklin para el sistema Delta. Con 4 direcciones digitales posibles. Ni siquiera tenía la posibilidad de configurar las direcciones de un modo sencillo, era necesario soldar y desoldar puentes (ver esquina superior derecha en la foto). Lleva un chip 701-13 y el de la foto está codificado con la dirección 24, (1 _ _ 1).
|
Delta 6603
Este Decoder no tiene funciones y sólo admite 15 direcciones digitales.
Al contrario que su antecesor en que era necesario soldar unos puentes para programar la dirección, en este modelo, La dirección digital se programa por 4 micro interruptores. Sólo admite 14 pasos de velocidad. |
|
Delta 66031
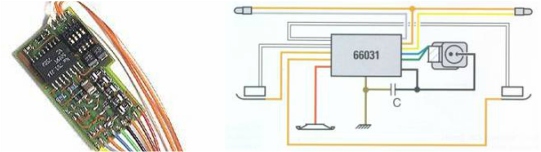
15 direcciones. La luces siempre están encendidas pero cambian según el sentido de la marcha. Dispone de función para fumígeno y telex. Programación por 4 micro interruptores
Motor: 800mA: Luces: 100mA, Función: 250mA, Total: max. 1,1 A con Protección ante sobrecargas y cortocircuitos. |
Delta 66032

Igual que el 66031, pero con 80 direcciones y las luces se pueden apagar desde mando digital. Como se ve en la foto tiene 8 micro interruptores en vez de 4.
Motor: max. 1000 mA Luces: max. 200mA Función: max. 250m Total: max. 1,2 A Con protección ante sobrecargas y cortocircuitos. |
Programación de la dirección digital en el sistema DELTA:
El sistema DELTA es una versión especial del sistema digital. En el siguiente link se puede encontrar una descripción más detallada sobre este tipo especial de decoders y la programación de su dirección digital con el Dip Switch o piano de ratón: Detalle sobre los Decoder Delta por José Antonio Marcos
DIGITAL
|
Digital 6080
Dispone de una función (luces) y 80 direcciones. dispone de una función que normalmente se usa para luces. Diseñado para motores con estator de bobina.
|
Digital 6090
Con una función (luces), 80 direcciones. Con imán permanente y rotor de 5 polos. Aparte de los micro interruptores para programar la dirección digital, dispone de 2 potenciómetros para regular la velocidad de marcha y la aceleración y desaceleración. Puede controlar 27 pasos de velocidad.
|
|
SET Digital 60901
Decoder de alta eficiencia: igual que el 6090 para imán permanente pero con dos funciones extras y nuevo protocolo Motorola II. Sólo para motores DCM. Funciones F1, F2, y F4 que deshabilita el control de arranque y parada progresivo 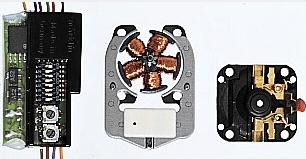
Decoder Digital 60902
Igual que 60901 pero no se incluye imán permanente. Se usa para actualizar locomotoras con decoder antiguo que llevan imán permanente. 
|
|


Decoder Digital 60905

|
Decoder de alta eficiencia para convertir locomotoras con motores con armadura de campana. La salida de motor en este decoder está diseñada, especialmente, para los requerimientos de este tipo de motores. El resto de características técnicas tales como funciones controlables, corriente de carga, etc... son las mismas que las del decoder del kit 60901.
|
Los decoder digitales con referencias: 6080, 6090, 60901, 60902, 60903, 60904 y 60905 son productos descatalogados.
|
Decoder digital 60906 sin conector cables sueltos para soldar


|
- El decoder 60906, es la versión del programa de 2019-2020, del popular decoder 6090. Sirve para digitalizar locomotoras Märklin con motores con bobinas de excitación con colector de tambor o de disco, es decir, para motores universales märklin sin imán permanente. El decoder se integra en sustitución del conmutador mecánico de sentido de marcha, el decoder C80 (6080) o el decoder Delta. - Digitalización de locomotoras con motor universal.
- No es necesario modificar el motor con el cambio a imán permanente. - Admite los formatos digitales mfx, MM1, MM2 y DCC. - 2 Salidas auxiliares de función particularmente potentes para acoplamientos Telex antiguos, bombillas y generadores de humo. - No dispone de regulación de la compensación de carga en el motor. Muy útil en aquellas locomotoras que al sustituir el estator de bobina por un imán permanente dan problemas de giro del motor. El manual se puede encontrar en la sección de documentación de la web de Trescarriles: http://www.trescarriles.com/documentacion.html.
Una cosa que he descubierto es que tiene capacidad de más programación de la que creía, aunque evidentemente con las limitaciones que el propio decoder tiene y el manual no aclara debidamente. Otra cosa que he descubierto hoy al ponerle un 60906 que tenía a un automotor Märklin 3016. Las figuras de cableado de conexión que hay al principio y al final del manual que acompaña al decoder en la caja, y ocurre lo mismo con el que se descarga con más idiomas de la web, tienen una diferencia... Y esa diferencia es importante. Me explico. |
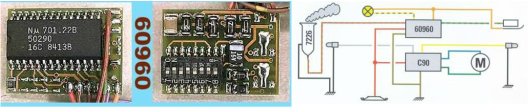
Decoder de Funciones Digital 60960 o C96
Es un decoder de 4 funciones sin control motor que puede utilizarse sólo en conjunto con otro decoder como el Delta 6080 o 6090. Funcion 1+2: max. 500mA - Funcion 1+2 : max. 200mA - Total: max. 1 A
Es un decoder de 4 funciones sin control motor que puede utilizarse sólo en conjunto con otro decoder como el Delta 6080 o 6090. Funcion 1+2: max. 500mA - Funcion 1+2 : max. 200mA - Total: max. 1 A
Marklin MFX y MFX+
Este decoder fué desarrollado en conjunto entre Märklin y ESU y es el primero que admite cierto tipo de comunicadión bidireccional al menos para los comandos de programación, con lo que se autoconfigura en la central sin necesidad de que le demos una dirección digital. Además una vez configurado, permite que se le modifiquen otros datos de sus CV sobre la marcha. Aparte de las funciones físicas habituales también dispone de 18 funciones incluyendo las funciones lógicas y de sonidos. Es un decoder muy avanzado que tiene todas las posibilidades de sus antecesores pero con un control más preciso de los motores, con 128 pasos de velocidad y una regulación de marcha y compensación de carga muy suave. También admite una gran variedad de sonidos de locomotora.
La versión plus incorpora una comunicación bidireccional total, no sólo para la programación como los MFX estándar sino también para enviar el estado de todas sus CV constantemente y en tiempo real a la central. Märklin de momento sólo ha usado esta comunicación bidireccional para simular en su central más avanzada (CS2) las cabinas de las locomotoras con algunos de sus mandos y mostrándolos según el estado del decoder. Incluido los niveles de combustible, agua, etc. simulando su consumo según la marcha de la locomotora. Es de esperar que Märklin acabe utilizando la bidireccionalidad para identificar también la posición exacta de la locomotora sobre la maqueta, lo que es una de las grandes ventajas de la comunicación bidireccional y que los decoders DCC de ESU, Lenz, etc. ya utilizan.
Este decoder fué desarrollado en conjunto entre Märklin y ESU y es el primero que admite cierto tipo de comunicadión bidireccional al menos para los comandos de programación, con lo que se autoconfigura en la central sin necesidad de que le demos una dirección digital. Además una vez configurado, permite que se le modifiquen otros datos de sus CV sobre la marcha. Aparte de las funciones físicas habituales también dispone de 18 funciones incluyendo las funciones lógicas y de sonidos. Es un decoder muy avanzado que tiene todas las posibilidades de sus antecesores pero con un control más preciso de los motores, con 128 pasos de velocidad y una regulación de marcha y compensación de carga muy suave. También admite una gran variedad de sonidos de locomotora.
La versión plus incorpora una comunicación bidireccional total, no sólo para la programación como los MFX estándar sino también para enviar el estado de todas sus CV constantemente y en tiempo real a la central. Märklin de momento sólo ha usado esta comunicación bidireccional para simular en su central más avanzada (CS2) las cabinas de las locomotoras con algunos de sus mandos y mostrándolos según el estado del decoder. Incluido los niveles de combustible, agua, etc. simulando su consumo según la marcha de la locomotora. Es de esperar que Märklin acabe utilizando la bidireccionalidad para identificar también la posición exacta de la locomotora sobre la maqueta, lo que es una de las grandes ventajas de la comunicación bidireccional y que los decoders DCC de ESU, Lenz, etc. ya utilizan.

|
Märklin SoundDecoder MsD3 |


|
Conector de 21 Pines
Decoder de sonidos, para remodelar locomotoras H0 de Märklin/Trix con motor de alta potencia integrado u otros motores de CC. Con interfaz de 21 polos. Incorpora una placa de conexión para este decoder y un zócalo de plástico para alojar el decoder en conversiones de locomotoras analógicas y digitales. Soporta los formatos Mfx, MM1, MM2 y DCC. Existen 3 referencias:
- 60975 con sonidos de locomotora de vapor - 60976 con sonidos de locomotora Diésel - 60977 con sonidos de locomotora Eléctrica Para reconvertir locomotoras Hobby H0 de Märklin de la serie 36 existen otras 2 referencias con una placa de interfaz de 21 polos especialmente diseñada para locomotoras con bogies de esta serie: - 60978 con sonidos para locomotora Diésel (Hércules) - 60979 con sonidos para locomotora Eléctrica (Traxx) Conector NEM de 8 Pines
Incorpora un mazo de cables soldados al conector NEM de 8 pines muy apropiado y útil para locomotoras con poco espacio donde no cabe el zócalo de plástico. Existen también 3 referencias:
- 60985 con sonidos para locomotoras de vapor - 60986 con sonidos para locomotoras Diesel - 60987 con sonidos para locomotoras Eléctricas |
El manual para los decoder de sonidos se puede encontrar en nuestra sección de Documentación

|
Märklin LokDecoder mLD3 |


|
60972 Conector de 21 Pines
Decoder sin sonidos, para remodelar locomotoras H0 de Märklin/Trix con motor de alta potencia integrado u otros motores de CC. Con interfaz de 21 polos. Incorpora una placa de conexión para este decoder y un zócalo de plástico para alojar el decoder en conversiones de locomotoras analógicas y digitales. Soporta los formatos Mfx, MM1, MM2 y DCC. Referencia 60972.
Pincha el siguiente enlace al trabajo de nuestro amigo José Antonio Markos sobre este decoder 60972. También puedes encontrar un trabajo práctico de digitalización de una locomotora Märklin con este decoder en nuestra sección de Mantenimiento de Locomotoras o pinchando directamente en el siguiente enlace: Digitalización Locomotora V100 con decoder mLD3
60982 Conector de 8 Pines Incorpora un mazo de cables soldados al conector NEM de 8 pines muy apropiado y útil para locomotoras con poco espacio donde no cabe el zócalo de plástico. Referencia 60982.
|
El manual oficial para los decoder sin sonido se puede encontrar en nuestra sección de Documentación

|
Precaución:
Estos nuevos decoders no tienen la misma configuración de colores en los cables de modo que hay que prestar mucha atención a las instrucciones para no equivocarse. Unos usan el código de colores Märklin y otros el código de colores DCC. |
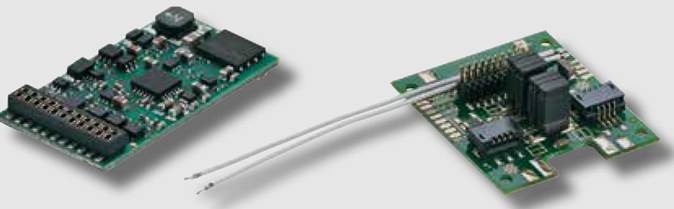
Decoders Multiprotocolo de la marca ESU
 Loksound V4 M4
Loksound V4 M4
ESU M4 (MFX)
ESU fabricó junto con Märklin el primer decoder MFX pero tras romper sus relaciones comerciales, siguió fabricando este decoder bajo el nombre M4. Realmente se trata del mismo decoder con la única diferencia del rango de valores de las CV. En realidad es una pequeña diferencia ya que dispone de todas las funciones del MFX de Märklin y por supuesto el protocolo es exactamente el mismo, aunque no dispone de la extensión MFX plus. Este decoder también puede actualizarse y modificarse internamente con el dispositivo especial Lokprogramer de ESU. Esto permite cambiar los sonidos de locomotora adecuándolos a un modelo concreto o modificar cualquier otro valor interno. Aparte de la primera versión M4 3.5, la última versión es la V4-M4 que es un decoder multiprotocolo que incluye el protocolo Mfx
ESU fabricó junto con Märklin el primer decoder MFX pero tras romper sus relaciones comerciales, siguió fabricando este decoder bajo el nombre M4. Realmente se trata del mismo decoder con la única diferencia del rango de valores de las CV. En realidad es una pequeña diferencia ya que dispone de todas las funciones del MFX de Märklin y por supuesto el protocolo es exactamente el mismo, aunque no dispone de la extensión MFX plus. Este decoder también puede actualizarse y modificarse internamente con el dispositivo especial Lokprogramer de ESU. Esto permite cambiar los sonidos de locomotora adecuándolos a un modelo concreto o modificar cualquier otro valor interno. Aparte de la primera versión M4 3.5, la última versión es la V4-M4 que es un decoder multiprotocolo que incluye el protocolo Mfx
Lokpilot V4
Es el decoder más alto de la gama de la familia Lokpilot que empezó con el lokpilot basic y a continuación las diferentes series v2, v3, v3.5 y v4. Todos ellos con versiones exclusivas DCC o versiones Multiprotocolo con DCC, Motorla I, Motorola II, Selectrix, etc. La construcción y funciones disponibles de estos decoders los convierten en los más versátiles del mercado. Excelente control de motores, aceleración, desaceleración, control de inercia, adaptada a cada tipo de motor, etc. hasta 20 funciones digitales y modelos para todas las escalas, y tipos de conexión a la locomotora, conexión NEM 8 pines, 21 pines, etc. Desde la versión 3, estos decoders incorporan el protocolo de bidireccionalidad Rail-com y desde la versión 4, la extensión Rail-com plus. Este protocolo permite la programación de las CV en tres modos; en via de programación, en vía principal (POM) y programación en marcha (On live). Esto es posible siempre que la central utilizada disponga de dicho protocolo como por ejemplo la central ECOS de ESU. Este fabricante además comercializa decoders de lectura en vía del protocolo Rail-com con lo que es posible identificar con exactitud en que punto de la maqueta se encuentra cada locomotora. Existen circuitos solo con rail-com para incorporar en locomotoras con decoders que no dispongan de este protocolo, o para incorporarlos en vagones, tenders, etc.
Es el decoder más alto de la gama de la familia Lokpilot que empezó con el lokpilot basic y a continuación las diferentes series v2, v3, v3.5 y v4. Todos ellos con versiones exclusivas DCC o versiones Multiprotocolo con DCC, Motorla I, Motorola II, Selectrix, etc. La construcción y funciones disponibles de estos decoders los convierten en los más versátiles del mercado. Excelente control de motores, aceleración, desaceleración, control de inercia, adaptada a cada tipo de motor, etc. hasta 20 funciones digitales y modelos para todas las escalas, y tipos de conexión a la locomotora, conexión NEM 8 pines, 21 pines, etc. Desde la versión 3, estos decoders incorporan el protocolo de bidireccionalidad Rail-com y desde la versión 4, la extensión Rail-com plus. Este protocolo permite la programación de las CV en tres modos; en via de programación, en vía principal (POM) y programación en marcha (On live). Esto es posible siempre que la central utilizada disponga de dicho protocolo como por ejemplo la central ECOS de ESU. Este fabricante además comercializa decoders de lectura en vía del protocolo Rail-com con lo que es posible identificar con exactitud en que punto de la maqueta se encuentra cada locomotora. Existen circuitos solo con rail-com para incorporar en locomotoras con decoders que no dispongan de este protocolo, o para incorporarlos en vagones, tenders, etc.

Loksound V4
Este es el mismo decoder que el Lokpilot pero con sonido. ESU dispone de mutlitud de sonidos que pueden descargarse gratuitamente de su base de datos para modificar el sonido de sus decoder y adpatarlo a un modelo concreto de locomotora.
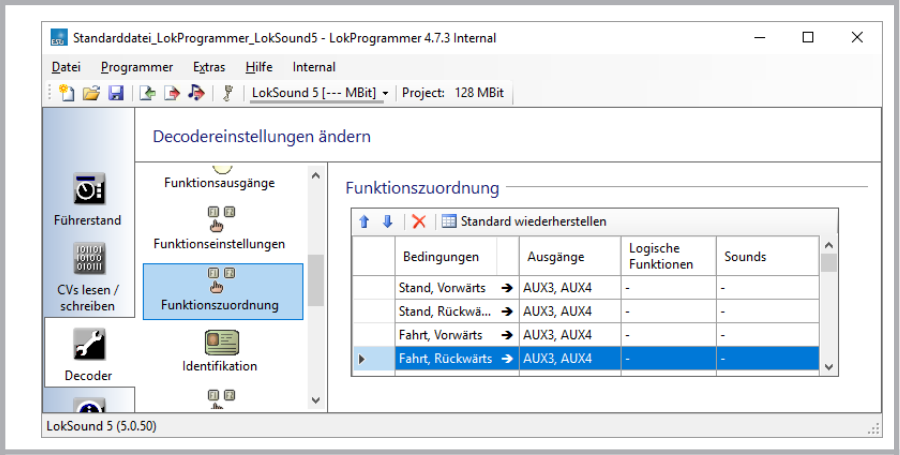
Para modificar el sonido de un decoder se necesita un dispositivo programador especial fabricado por ESU, el Lokprogramer, que permite tanto la actualización del firmware de cualquier tipo de decoder de la marca, como la modificación de sus sonidos o cualquier otro valor interno.
En la página de ESU - Electronic Solutions Ulm GmbH & Co. se pueden consultar todos los modelos y características.
Este es el mismo decoder que el Lokpilot pero con sonido. ESU dispone de mutlitud de sonidos que pueden descargarse gratuitamente de su base de datos para modificar el sonido de sus decoder y adpatarlo a un modelo concreto de locomotora.
Para modificar el sonido de un decoder se necesita un dispositivo programador especial fabricado por ESU, el Lokprogramer, que permite tanto la actualización del firmware de cualquier tipo de decoder de la marca, como la modificación de sus sonidos o cualquier otro valor interno.
En la página de ESU - Electronic Solutions Ulm GmbH & Co. se pueden consultar todos los modelos y características.
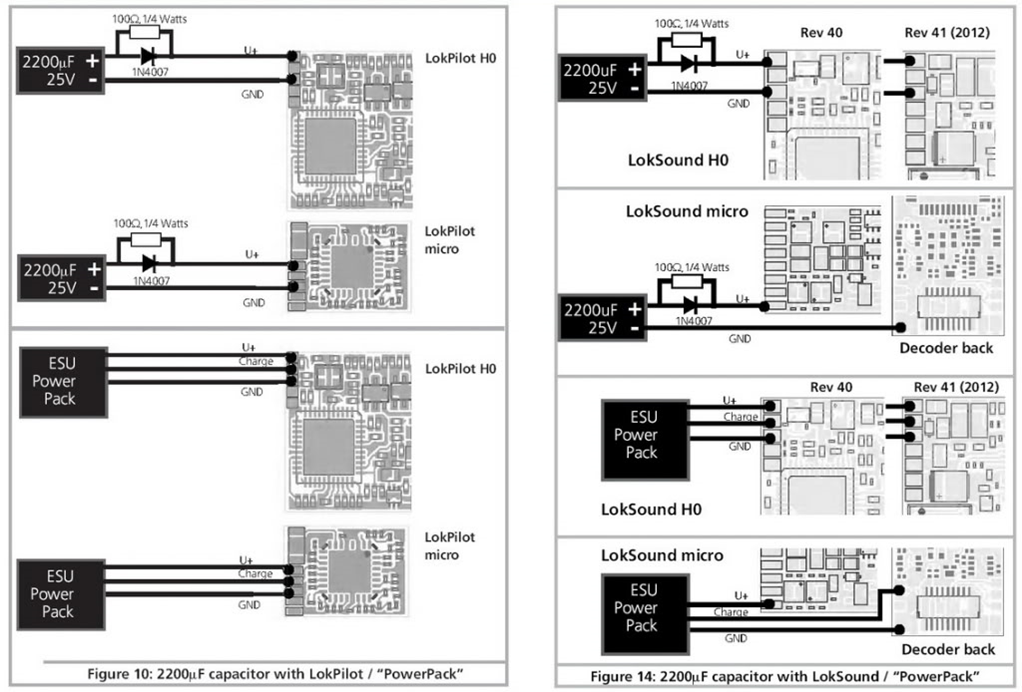
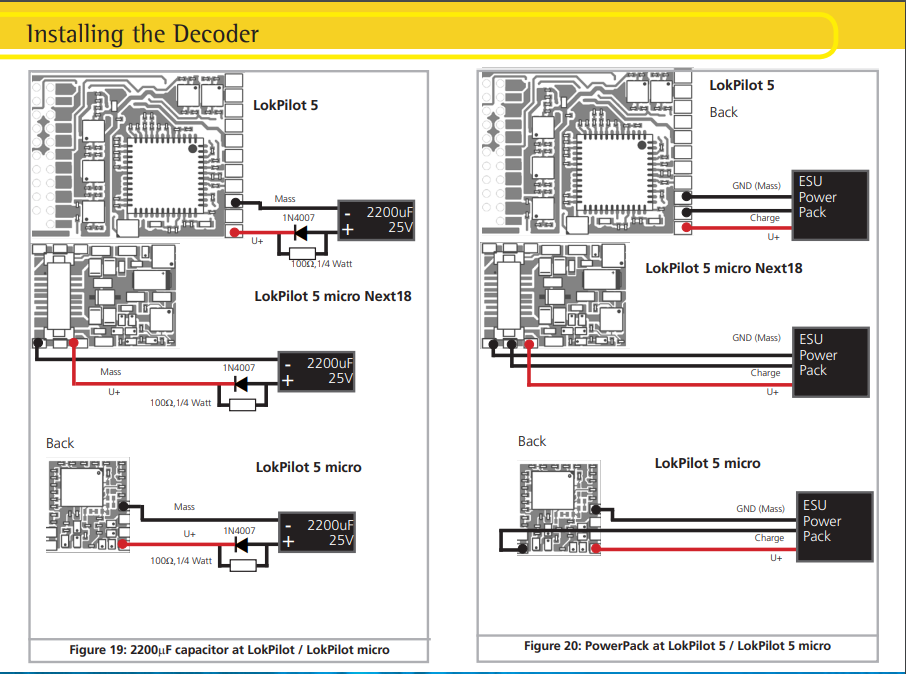
Mejoras de conductividad en Lokpilot y Loksound
En ocasiones puede ocurrir que las locomotoras pierdan contacto eléctrico con la vía, debido a suciedad, etc. Una manera de resolverlo puede ser conectar al decoder, un conjunto Condensador/resistencia hecho por nosotros mismos o un "Powerpack" fabricado por Esu. En la imagen siguiente se indica como hacerlo y como conectarlos a los diferentes tipos de decoder Lokpilot y loksound.
Decoders multiprotocolo de la marca Uhlenbrock
Lista de decoders de Uhlenbrock
En el siguiente enlace podrás acceder a los manuales de todos los decoder Uhlenbrock http://www.uhlenbrock.de/de_DE/service/download/handbook/en/INDEX.HTM
73410 Motores DC y Faulhaber, Regulación de carga - año 2011
73800 Mini-Decoder para DCC y Motorola II - año 2014
73900 Mini-Decoder de Funciones - año 2011
75000 AnDi, Motorola, AC - año 2011
76320 Motores DC, Regulación de carga - año 2006
76330 Motores DC, Regulación de carga, conectores SUSI y LISSY, 21-pines conector72 - año 2007
76400 Motores DC, Regulación de carga, conectores SUSI y LISSY - año 2005
76420 Motores DC y Faulhaber, Regulación de carga - año 2011
76425 Motores DC y Faulhaber, Con RailCom® - año 2011
76560 Regulación de carga, RailCom®, 22-polos con interface PluX - año 2012
76900 H0-Decoder de Funciones Multiprotocolo - año 2006
77100 Regulación de carga - año 2014
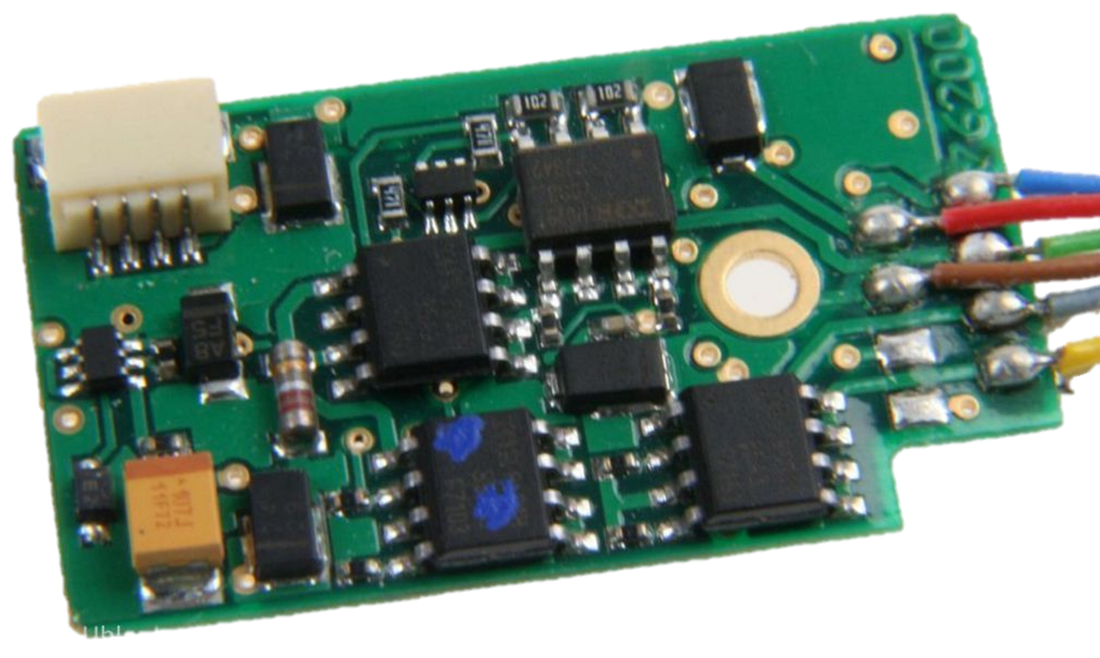
76200 Motores DC y motores universales Märklin, Regulación de carga, conectores SUSI y LISSY - año 2006
(Este decoder permite digitalizar un motor universal Märklin sin sustituir el estator de bobinas por imán permanente)
En el siguiente enlace podrás acceder a los manuales de todos los decoder Uhlenbrock http://www.uhlenbrock.de/de_DE/service/download/handbook/en/INDEX.HTM
73410 Motores DC y Faulhaber, Regulación de carga - año 2011
73800 Mini-Decoder para DCC y Motorola II - año 2014
73900 Mini-Decoder de Funciones - año 2011
75000 AnDi, Motorola, AC - año 2011
76320 Motores DC, Regulación de carga - año 2006
76330 Motores DC, Regulación de carga, conectores SUSI y LISSY, 21-pines conector72 - año 2007
76400 Motores DC, Regulación de carga, conectores SUSI y LISSY - año 2005
76420 Motores DC y Faulhaber, Regulación de carga - año 2011
76425 Motores DC y Faulhaber, Con RailCom® - año 2011
76560 Regulación de carga, RailCom®, 22-polos con interface PluX - año 2012
76900 H0-Decoder de Funciones Multiprotocolo - año 2006
77100 Regulación de carga - año 2014
76200 Motores DC y motores universales Märklin, Regulación de carga, conectores SUSI y LISSY - año 2006
(Este decoder permite digitalizar un motor universal Märklin sin sustituir el estator de bobinas por imán permanente)
Módulos de sonido para conectar al conector SUSI
32100 IntelliSound (Módulo vacío) - año 2006
32300 IntelliSound 3 - Módulo 32300 y 32304 con interface SUSI - año 2011
32400 IntelliSound - Módulo (with whish sound) - año 2006
Decoders con sonido
31xxx IntelliSound 3 - Decoder Multi-protocolo con Sonido - 3310, 33110, 33120, 33150 - año 2012
35330 IntelliSound 3 - Decoder Multi-protocolo con Sonido, Regulación de carga, con RailCom® -año 2012
36020 IntelliSound Decoder (Módulo vacío) - año 2006
36030 IntelliSound Decoder, 21-pines (módulo vacío) - año 2007
36420 IntelliSound Decoder (with whish sound) - año 2006
36430 IntelliSound Decoder, 21-pines (with whish sound) - año 2007
32100 IntelliSound (Módulo vacío) - año 2006
32300 IntelliSound 3 - Módulo 32300 y 32304 con interface SUSI - año 2011
32400 IntelliSound - Módulo (with whish sound) - año 2006
Decoders con sonido
31xxx IntelliSound 3 - Decoder Multi-protocolo con Sonido - 3310, 33110, 33120, 33150 - año 2012
35330 IntelliSound 3 - Decoder Multi-protocolo con Sonido, Regulación de carga, con RailCom® -año 2012
36020 IntelliSound Decoder (Módulo vacío) - año 2006
36030 IntelliSound Decoder, 21-pines (módulo vacío) - año 2007
36420 IntelliSound Decoder (with whish sound) - año 2006
36430 IntelliSound Decoder, 21-pines (with whish sound) - año 2007
Decoders especiales
Decoder Roco 10738
|
ROCO 10738
El decoder Roco 10738 es un decoder para Märklin, protocolo Motorola. Tiene la particularidad de usar un botón de programación que facilita cambiar algunos valores básicos de sus CV's. (dirección digital programable entre 1 y 80. No admite la programación en modo analógico). Ver instrucciones de programación (traducción de J. A. Marcos) |
Trabajos prácticos:
En nuestra página de Mantenimiento de Locomotoras podrás encontrar trabajos prácticos de digitalización de locomotoras, conversiones de analógico a Digital y otras utilidades como un sencillo comprobador de decoders que te pueden servir de ejemplo y aprendizaje para tus propias conversiones y digitalizaciones.
En nuestra página de Mantenimiento de Locomotoras podrás encontrar trabajos prácticos de digitalización de locomotoras, conversiones de analógico a Digital y otras utilidades como un sencillo comprobador de decoders que te pueden servir de ejemplo y aprendizaje para tus propias conversiones y digitalizaciones.
Programación de CVs.
Los decoder digitales modernos contienen todos sus valores de control de funcionamiento almacenado en unas variables de memoria denominadas CV's. Cada CV se encarga por si misma, o en combinación con otras, del control de alguna función concreta del decoder, Luces según el sentido de la marcha, parámetros del motor como compensación de carga, perfil de aceleración, y muchas otras.
Las CV se organizan en un mapa de memoria en el que a cada una de ellas se la identifica por un número, por ejemplo, la CV1 se encarga de almacenar la dirección digital de la locomotora, La CV2 se encarga del voltaje de arranque, la CV 3 de la aceleración, etc. No todos los fabricantes usan el mismo mapa y hay que tener cuidado, Märklin usa el suyo propio en el que a veces coinciden algunas CV y otras no, con el estándar DCC. Los decoder de ESU siempre usan el estándar DCC y proporciona en sus manuales el mapa completo de CV's con todo detalle. En nuestra página DOCUMENTACION podréis encontrar varias versiones traducidas al Español por nuestro amigo José Antonio Marcos.
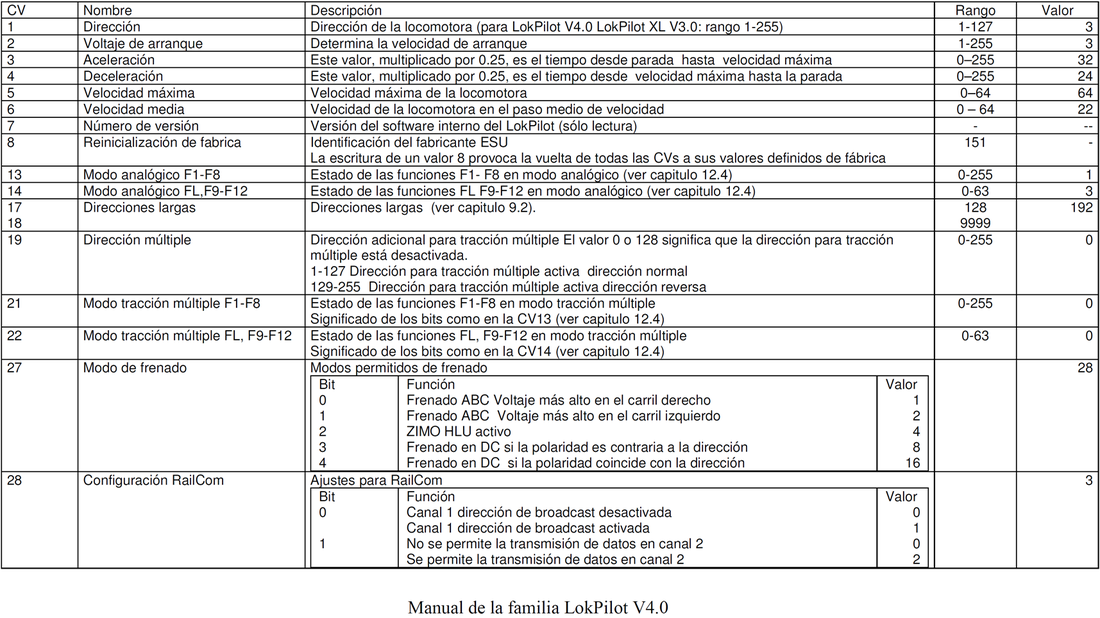
A continuación, un ejemplo con el extracto del manual del Lokpilot v4 con la primera parte del mapa de CV.
Las CV se organizan en un mapa de memoria en el que a cada una de ellas se la identifica por un número, por ejemplo, la CV1 se encarga de almacenar la dirección digital de la locomotora, La CV2 se encarga del voltaje de arranque, la CV 3 de la aceleración, etc. No todos los fabricantes usan el mismo mapa y hay que tener cuidado, Märklin usa el suyo propio en el que a veces coinciden algunas CV y otras no, con el estándar DCC. Los decoder de ESU siempre usan el estándar DCC y proporciona en sus manuales el mapa completo de CV's con todo detalle. En nuestra página DOCUMENTACION podréis encontrar varias versiones traducidas al Español por nuestro amigo José Antonio Marcos.
A continuación, un ejemplo con el extracto del manual del Lokpilot v4 con la primera parte del mapa de CV.
Calculadora Conversor Bits/Decimal
Es importante saber que Internamente las CV mantienen los valores en bits independientemente de que nosotros los modifiquemos en bits o en decimal, según el dispositivo de programación que utilicemos. Para facilitar el trabajo os dejamos esta calculadora de conversión de valores Bits / Decimal y viceversa.
Dispositivos para leer y escribir valores en las CV's
Hay decoders que pueden programarse exclusivamente en la vía de programación (decoders sin bidireccionalidad). Hay otros que también pueden programarse en la vía principal (POM) junto con el resto de locomotoras e incluso hay algunos decoder que pueden reprogramarse en plena circulación como los decoder con bidireccionalidad como los Mfx o los DCC con Rail-com. Además de lo anterior necesitaremos un dispositivo para leer y escribir valores en las CV.
Con las centrales digitales tipo ECoS de ESU, CS1 y CS2 de Märklin o con las más antiguas de Märklin o con la IB de Uhlenbrock se pueden programar las CV. Las más modernas muestran y permiten modificar gráficamente las funciones y valores de las CV (aparte de poder cambiar sus valores escribiendo valores decimales o binarios), mientras que en el caso de las más antiguas sólo dispondremos del método de escribir valores decimales o binarios, según el caso.
Aparte de las centrales, existen dispositivos específicos para programar las CV.
Hay decoders que pueden programarse exclusivamente en la vía de programación (decoders sin bidireccionalidad). Hay otros que también pueden programarse en la vía principal (POM) junto con el resto de locomotoras e incluso hay algunos decoder que pueden reprogramarse en plena circulación como los decoder con bidireccionalidad como los Mfx o los DCC con Rail-com. Además de lo anterior necesitaremos un dispositivo para leer y escribir valores en las CV.
Con las centrales digitales tipo ECoS de ESU, CS1 y CS2 de Märklin o con las más antiguas de Märklin o con la IB de Uhlenbrock se pueden programar las CV. Las más modernas muestran y permiten modificar gráficamente las funciones y valores de las CV (aparte de poder cambiar sus valores escribiendo valores decimales o binarios), mientras que en el caso de las más antiguas sólo dispondremos del método de escribir valores decimales o binarios, según el caso.
Aparte de las centrales, existen dispositivos específicos para programar las CV.

|
Märklin dispone de un dispositivo para reprogramar los decoder de nueva generación MsD3 y mLD3, aparte de poder hacerlo directamente desde la central.
Este dispositivo se llama mDT/3, referencia 60917. Es un dispositivo USB que se conecta al PC y con un software gratuito descargable desde la página web de Märklin, permite modificar y reprogramar fácilmente tanto los sonidos de los decoder como otras 32 funciones posibles. Pincha en este enlace para acceder al Manual del mDT/3 en Español |
|
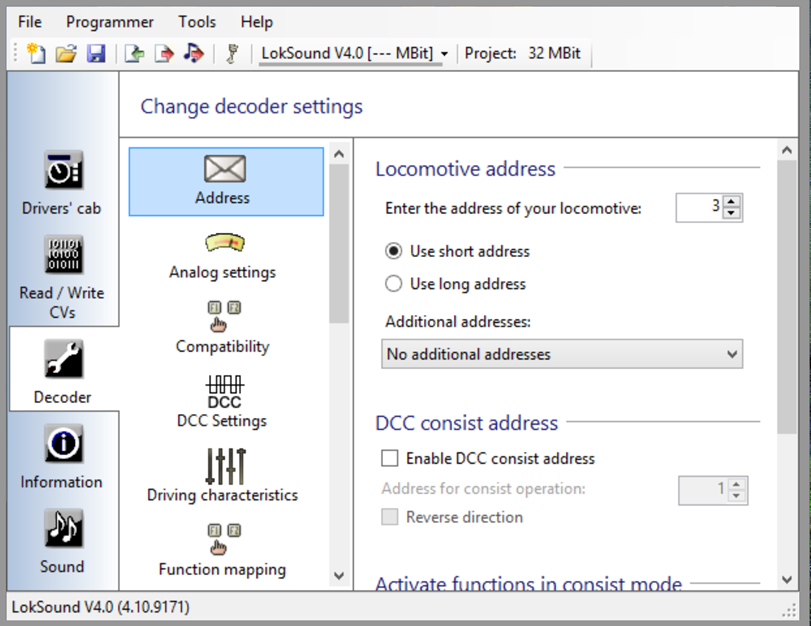
ESU dispone del 'Lokprogramer' para reprogramar sus decoder Loksound y Lokpilot. Utiliza un software muy gráfico que permite acceder al máximo detalle posible de programación. El software es de descarga gratuita desde la página de ESU y no es necesario disponer del dispositivo físico, para usarlo a modo de consulta de las características de cada modelo de decoder. Precisamente sobre este software, nuestro amigo Francisco Centol, nos ha preparado un manual donde nos explica cómo funciona, y cómo descubrir con él, cuáles son los valores más adecuados para cada decoder en función del motor de nuestra locomotora. Ver Programación de CV's por Francisco Centol
|
Ajuste fino y optimización del motor con los decoder ESU
Cada motor de locomotora tiene un comportamiento distinto, incluso entre motores del mismo tipo. A veces los decoder deben ajustarse a las peculiaridades de cada motor para aprovechar y optimizar su rendimiento y su comportamiento de marcha tanto a baja velocidad como a velocidad alta. Los valores que regulan el comportamiento del motor no se pueden estandarizar ni siquiera por tipo de motor, así que a veces, cuando el motor no se comporta correctamente, hay que encontrar los valores óptimos mediante prueba y error siguiendo un procedimiento sencillo pero entretenido. Para muchos aficionados esta es otra de las prácticas divertidas de nuestro Hobby. Para otros es un misterio, así que vamos a desvelarlo a continuación.
A menudo, al instalar el decoder la locomotora funciona correctamente y no es necesario realizar ajustes, especialmente con decoders de última generación como los Lokpilot v4 pero a veces la locomotora no marcha fina y realizando algunos cambios en determinadas CV se consigue optimizar el comportamiento del motor.
Existen 3 métodos para ajustar estos parámetros: Ajustar las CV's con los valores por defecto según el tipo de motor, Ajustar las CV de compensación de carga manualmente o Calibrar automáticamente el motor. Vamos a ver los 3 métodos basándonos en el manual oficial del decoder ESU Lokpilot v4 de Abril-2012:
A menudo, al instalar el decoder la locomotora funciona correctamente y no es necesario realizar ajustes, especialmente con decoders de última generación como los Lokpilot v4 pero a veces la locomotora no marcha fina y realizando algunos cambios en determinadas CV se consigue optimizar el comportamiento del motor.
Existen 3 métodos para ajustar estos parámetros: Ajustar las CV's con los valores por defecto según el tipo de motor, Ajustar las CV de compensación de carga manualmente o Calibrar automáticamente el motor. Vamos a ver los 3 métodos basándonos en el manual oficial del decoder ESU Lokpilot v4 de Abril-2012:
¿Cómo sabemos si tenemos que ajustar los parámetros de regulación de carga del motor?
Hay algunos síntomas que nos lo indican:
- La locomotora no marcha de manera regular o da saltos o tirones a velocidades bajas (en los pasos del decoder 1 o 2)
- La locomotora, al pararse, da un pequeño salto o tirón.
- La locomotora alcanza su velocidad máxima antes de que el regulador llegue al tope. (cerca de las 3/4 partes del recorrido del regulador)
Antes de nada, hay que decir que el objetivo es ajustar ciertos parámetros del decoder para optimizar las características del motor (regulación de carga) pero en ningún caso vamos a conseguir que un motor que funciona mal por si mismo, funcione mejor ajustando los parámetros del decoder. De modo que lo primero será asegurarnos que los fallos observados no son causa del propio motor. Para ello haremos lo siguiente:
Hay algunos síntomas que nos lo indican:
- La locomotora no marcha de manera regular o da saltos o tirones a velocidades bajas (en los pasos del decoder 1 o 2)
- La locomotora, al pararse, da un pequeño salto o tirón.
- La locomotora alcanza su velocidad máxima antes de que el regulador llegue al tope. (cerca de las 3/4 partes del recorrido del regulador)
Antes de nada, hay que decir que el objetivo es ajustar ciertos parámetros del decoder para optimizar las características del motor (regulación de carga) pero en ningún caso vamos a conseguir que un motor que funciona mal por si mismo, funcione mejor ajustando los parámetros del decoder. De modo que lo primero será asegurarnos que los fallos observados no son causa del propio motor. Para ello haremos lo siguiente:
Comprobaciones previas en motor y cinemática
- Descartar fallos mecánicos: (descentrado de ruedas, calado de bielas a 90º, engrase, etc.) el motor, ruedas y ejes deben girar con soltura. No se aprecian bloqueos o tropiezos ni en el movimiento de los ejes ni en el propio rotor del motor. (Ver el artículo sobre calado de bielas a 90º)
- Descartar fallos eléctricos: Revisar escobillas, contactos, etc. en buen estado. Revisar que no hay condensadores entre terminales del motor y chasis de la locomotora. No debe haber exceso de engrase, ni suciedad (ver el artículo sobre la limpieza y lubricación del motor en nuestra página sobre "Mantenimiento de motores Märklin")
- Descartar que el decoder influya en un mal comportamiento: Esta comprobación es clave para asegurarnos que no es el motor el que causa los fallos para ello tenemos que:
1. Apagar la compensación de carga escribiendo el valor 0 en la CV56 [CV56=0].
2. Ajustar voltaje de arranque incrementando el valor de la [CV2] hasta que la locomotora arranque en el paso 1 o 2 del decoder. (los valores normales de la CV2 deberían estar en 3 o 4)
[Antes de modificar las CV debemos apuntar su valor actual para poder volver a ponerlas como estaban en caso necesario]
Si una vez hecho esto el problema persiste es muy probable que tengamos un fallo mecánico. Si el problema desaparece entonces debemos empezar a ajustar los parámetros de compensación de carga.
1. Ajustar las CV de compensación de carga según la tabla de valores por defecto por tipo de motor
Es fundamental realizar las comprobaciones previas descritas en el punto anterior.
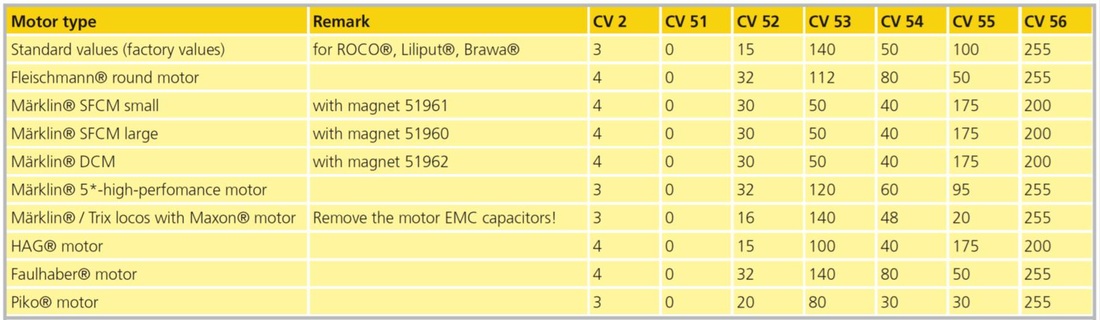
- Decoder ESU Lokpilot V4:
Es importante tener en cuenta que éstos son los valores por defecto que publica ESU en el manual de sus decoder Lokpilot V4. ( Abril-2012).
- Descartar fallos mecánicos: (descentrado de ruedas, calado de bielas a 90º, engrase, etc.) el motor, ruedas y ejes deben girar con soltura. No se aprecian bloqueos o tropiezos ni en el movimiento de los ejes ni en el propio rotor del motor. (Ver el artículo sobre calado de bielas a 90º)
- Descartar fallos eléctricos: Revisar escobillas, contactos, etc. en buen estado. Revisar que no hay condensadores entre terminales del motor y chasis de la locomotora. No debe haber exceso de engrase, ni suciedad (ver el artículo sobre la limpieza y lubricación del motor en nuestra página sobre "Mantenimiento de motores Märklin")
- Descartar que el decoder influya en un mal comportamiento: Esta comprobación es clave para asegurarnos que no es el motor el que causa los fallos para ello tenemos que:
1. Apagar la compensación de carga escribiendo el valor 0 en la CV56 [CV56=0].
2. Ajustar voltaje de arranque incrementando el valor de la [CV2] hasta que la locomotora arranque en el paso 1 o 2 del decoder. (los valores normales de la CV2 deberían estar en 3 o 4)
[Antes de modificar las CV debemos apuntar su valor actual para poder volver a ponerlas como estaban en caso necesario]
Si una vez hecho esto el problema persiste es muy probable que tengamos un fallo mecánico. Si el problema desaparece entonces debemos empezar a ajustar los parámetros de compensación de carga.
1. Ajustar las CV de compensación de carga según la tabla de valores por defecto por tipo de motor
Es fundamental realizar las comprobaciones previas descritas en el punto anterior.
- Decoder ESU Lokpilot V4:
Es importante tener en cuenta que éstos son los valores por defecto que publica ESU en el manual de sus decoder Lokpilot V4. ( Abril-2012).
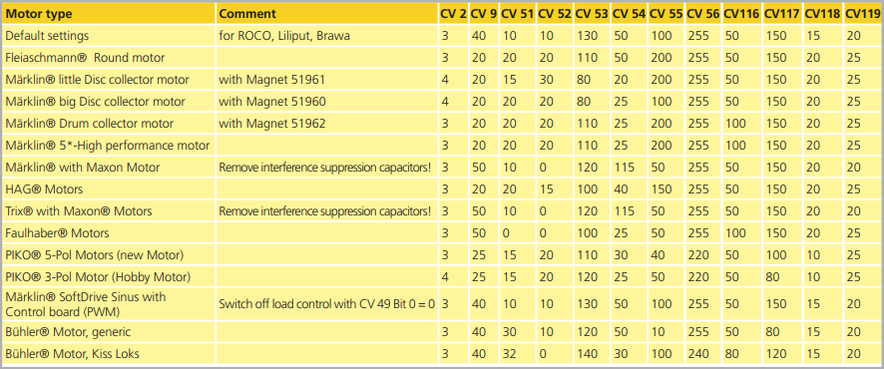
- Decoder ESU Lokpilot V5:
Es importante tener en cuenta que estos son los valores por defecto que publica ESU en el manual de sus decoder Lokpilot V5. ( Mayo-2021).
Es importante tener en cuenta que estos son los valores por defecto que publica ESU en el manual de sus decoder Lokpilot V5. ( Mayo-2021).
2. Ajustar las CV de compensación de carga manualmente
A continuación se explica como configurarlo con las versiones 4 y 5 del decoder Lokpilot de ESU:
- Decoder ESU Lokpilot V4:
Antes de nada, es fundamental realizar las comprobaciones previas de motor y cinemática descritas anteriormente.
En la compensación de carga del motor influyen varias CVs. El Voltaje de referencia [CV53], el parámetro K [CV54], el parámetro K lento [CV52], el parámetro I [CV55], el parámetro I lento [CV51] y el Control Dinámico de la compensación de carga [CV56]. Primero, antes de modificar las CV debemos apuntar su valor actual para poder volver a ponerlas como estaban en caso necesario. Una vez hecho esto podemos seguir el siguiente orden:
A continuación se explica como configurarlo con las versiones 4 y 5 del decoder Lokpilot de ESU:
- Decoder ESU Lokpilot V4:
Antes de nada, es fundamental realizar las comprobaciones previas de motor y cinemática descritas anteriormente.
En la compensación de carga del motor influyen varias CVs. El Voltaje de referencia [CV53], el parámetro K [CV54], el parámetro K lento [CV52], el parámetro I [CV55], el parámetro I lento [CV51] y el Control Dinámico de la compensación de carga [CV56]. Primero, antes de modificar las CV debemos apuntar su valor actual para poder volver a ponerlas como estaban en caso necesario. Una vez hecho esto podemos seguir el siguiente orden:
Ajuste del Control Dinámico de la Compensación de Carga [CV56]
Este Valor se puede ajustar como se desee entre 0 (anula el efecto de la compensación de carga) y 100% que aplica la compensación al máximo. A velocidades bajas se recomienda usar 100%. Para seguir con los ajustes del resto de parámetros de momento dejaremos esta CV al valor máximo 100%
Este Valor se puede ajustar como se desee entre 0 (anula el efecto de la compensación de carga) y 100% que aplica la compensación al máximo. A velocidades bajas se recomienda usar 100%. Para seguir con los ajustes del resto de parámetros de momento dejaremos esta CV al valor máximo 100%
Ajuste del voltaje de referencia [CV53]
Si el motor alcanza la velocidad máxima cuando el regulador de velocidad de la central aún está en la tercera parte de su recorrido y el resto de éste no influye en las revoluciones del motor debemos disminuir el valor de la CV 53 hasta ajustarlo. Para ello, reduciremos 5 u 8 puntos y probaremos la locomotora, y si es necesario seguiremos disminuyendo hasta que el motor alcance las revoluciones máximas cuando el regulador llegue al tope del recorrido.
Si el motor alcanza la velocidad máxima cuando el regulador de velocidad de la central aún está en la tercera parte de su recorrido y el resto de éste no influye en las revoluciones del motor debemos disminuir el valor de la CV 53 hasta ajustarlo. Para ello, reduciremos 5 u 8 puntos y probaremos la locomotora, y si es necesario seguiremos disminuyendo hasta que el motor alcance las revoluciones máximas cuando el regulador llegue al tope del recorrido.
Ajuste del parámetro K [CV54]
El parámetro K regula la influencia que la compensación de carga tendrá sobre el comportamiento de marcha. Cuanto mayor sea el valor de la CV más se compensarán las diferencias en las revoluciones del motor. Si la locomotora corre a tirones es necesario ajustar este parámetro. Para ello reduciremos el valor de la CV en de 5 unidades, probaremos la marcha de la locomotora y si hace falta repetiremos el proceso hasta que observemos que dejan de producirse tirones en la marcha de la locomotora.
El parámetro K regula la influencia que la compensación de carga tendrá sobre el comportamiento de marcha. Cuanto mayor sea el valor de la CV más se compensarán las diferencias en las revoluciones del motor. Si la locomotora corre a tirones es necesario ajustar este parámetro. Para ello reduciremos el valor de la CV en de 5 unidades, probaremos la marcha de la locomotora y si hace falta repetiremos el proceso hasta que observemos que dejan de producirse tirones en la marcha de la locomotora.
Ajuste del parámetro K Lento [CV52]
El parámetro K Lento se encarga de regular la influencia de la compensación de carga en la marcha de la locomotora a paso muy lento o en el arranque. Si la locomotora da tirones a paso 1 de velocidad o en el arranque mientras que a media o alta velocidad el comportamiento es correcto, se necesita ajustar este parámetro con la CV52. Para ello, aumentaremos el valor de la [CV52] entre 5 y 10 unidades por encima del valor que tengamos en la [CV54]
El parámetro K Lento se encarga de regular la influencia de la compensación de carga en la marcha de la locomotora a paso muy lento o en el arranque. Si la locomotora da tirones a paso 1 de velocidad o en el arranque mientras que a media o alta velocidad el comportamiento es correcto, se necesita ajustar este parámetro con la CV52. Para ello, aumentaremos el valor de la [CV52] entre 5 y 10 unidades por encima del valor que tengamos en la [CV54]
Ajuste del parámetro I [CV55]
El parámetro I informa al decoder de cuanta inercia tiene el motor. Los motores grandes con volantes de inercia tienen más inercia lógicamente que los más pequeños o los de campana. Cuando la locomotora vibra justo antes de parar o salta a velocidades bajas o simplemente no rueda con suavidad, debemos ajustar el parámetro I con la CV55. Para ello según el motor:
- Motores con pequeños volantes de inercia o sin ellos: Incrementaremos el valor de la CV en 5 unidades, comenzando con el valor por defecto, para dichos motores. Probamos y repetimos el proceso hasta que consigamos los resultados deseados.
- Motores con grandes volantes de inercia: Reduciremos en 5 unidades el valor de la CV comenzando con los valores por defecto para estos motores. Probamos y repetimos el proceso hasta que consigamos los resultados deseados.
El parámetro I informa al decoder de cuanta inercia tiene el motor. Los motores grandes con volantes de inercia tienen más inercia lógicamente que los más pequeños o los de campana. Cuando la locomotora vibra justo antes de parar o salta a velocidades bajas o simplemente no rueda con suavidad, debemos ajustar el parámetro I con la CV55. Para ello según el motor:
- Motores con pequeños volantes de inercia o sin ellos: Incrementaremos el valor de la CV en 5 unidades, comenzando con el valor por defecto, para dichos motores. Probamos y repetimos el proceso hasta que consigamos los resultados deseados.
- Motores con grandes volantes de inercia: Reduciremos en 5 unidades el valor de la CV comenzando con los valores por defecto para estos motores. Probamos y repetimos el proceso hasta que consigamos los resultados deseados.
Ajuste del parámetro I Lento [CV51]
En esta CV se ajusta el valor de inercia al arranque de la locomotora o a bajas velocidades (pasos 1 y 2 del decoder).
En esta CV se ajusta el valor de inercia al arranque de la locomotora o a bajas velocidades (pasos 1 y 2 del decoder).
- Decoder ESU Lokpilot V5:
Al igual que en el Lokpilot V4 es fundamental realizar las comprobaciones previas de motor y cinemática descritas anteriormente. A continuación está la traducción al español del capítulo 11 del manual:
La sexta generación de la compensación de carga en los decoders Lokpilot de ESU habilita la ejecución precisa del control del motor. Incluso con la configuración de fábrica, la mayoría de las locomotoras funcionan perfectamente.
Al igual que en el Lokpilot V4 es fundamental realizar las comprobaciones previas de motor y cinemática descritas anteriormente. A continuación está la traducción al español del capítulo 11 del manual:
La sexta generación de la compensación de carga en los decoders Lokpilot de ESU habilita la ejecución precisa del control del motor. Incluso con la configuración de fábrica, la mayoría de las locomotoras funcionan perfectamente.
11.1. Ajuste de la compensación de carga
Debería hacerse después de programar y hacer los test iniciales de que la locomotora no rueda suavemente, principalmente a baja velocidad o cuando la locomotora salta un poco después de parar o incluso si no estás satisfecho con el comportamiento al controlarla, en esos casos la compensación de carga debería ser ajustada en tu decoder Lokpilot. Debido a la gran cantidad de tipos de motores diferentes y de los sistemas digitales o analógicos de conducción, no hay una configuración exacta que se adapte a todos. La compensación de carga puede ser influenciada con 10 CV's. Primeramente, chequea si el comportamiento irregular es debido a fallos mecánicos. Las bielas dobladas es una de las causas comunes. Cuando se desconecta la compensación de carga (configura la CV49 Bit 0 a 0) y el problema persiste entonces es que hay un problema mecánico.
Debería hacerse después de programar y hacer los test iniciales de que la locomotora no rueda suavemente, principalmente a baja velocidad o cuando la locomotora salta un poco después de parar o incluso si no estás satisfecho con el comportamiento al controlarla, en esos casos la compensación de carga debería ser ajustada en tu decoder Lokpilot. Debido a la gran cantidad de tipos de motores diferentes y de los sistemas digitales o analógicos de conducción, no hay una configuración exacta que se adapte a todos. La compensación de carga puede ser influenciada con 10 CV's. Primeramente, chequea si el comportamiento irregular es debido a fallos mecánicos. Las bielas dobladas es una de las causas comunes. Cuando se desconecta la compensación de carga (configura la CV49 Bit 0 a 0) y el problema persiste entonces es que hay un problema mecánico.
11.1.1. Parámetros para motores usados frecuentemente
Configura los valores adecuados según la tabla para el Lokpilot V5 (mostrada arriba) y testea la conducción de tu locomotora.
Configura los valores adecuados según la tabla para el Lokpilot V5 (mostrada arriba) y testea la conducción de tu locomotora.
11.1.2. Ajustes para otros motores / "Ajuste fino"
Desafortunadamente, los motores disponibles en el mercado tienen significativas variaciones debido a las tolerancias. Esto es aplicable incluso para los del mismo tipo. Por ello, los decoder Lokpilot habilitan la posibilidad de adaptar la compensación de carga del motor mediante las CV's 51 a 56 y 116 a 119. Si los valores recomendados no ofrecen unos resultados aceptables, se pueden optimizar. Especialmente, para la zona de conducción baja (velocidad a paso 1), el Lokpilot V5 puede cambiar el control de la ganancia usando las variables CV51 y CV52. Esto ayuda a evitar cualquier salto o tirón mientras se conduce extremadamente lenta. Sin embargo, antes de hacer esto debes asegurarte que no hay condensadores cableados entre los terminales del motor y el chasis. El colector del motor debe estar limpio y el sistema de conducción (engranajes y elementos mecánicos, debe girar y funcionar libremente. Los contactos de las ruedas deben también estar limpias y hacer un contacto adecuado.
Desafortunadamente, los motores disponibles en el mercado tienen significativas variaciones debido a las tolerancias. Esto es aplicable incluso para los del mismo tipo. Por ello, los decoder Lokpilot habilitan la posibilidad de adaptar la compensación de carga del motor mediante las CV's 51 a 56 y 116 a 119. Si los valores recomendados no ofrecen unos resultados aceptables, se pueden optimizar. Especialmente, para la zona de conducción baja (velocidad a paso 1), el Lokpilot V5 puede cambiar el control de la ganancia usando las variables CV51 y CV52. Esto ayuda a evitar cualquier salto o tirón mientras se conduce extremadamente lenta. Sin embargo, antes de hacer esto debes asegurarte que no hay condensadores cableados entre los terminales del motor y el chasis. El colector del motor debe estar limpio y el sistema de conducción (engranajes y elementos mecánicos, debe girar y funcionar libremente. Los contactos de las ruedas deben también estar limpias y hacer un contacto adecuado.
11.1.2.1. Parámetro "K" [CV 54]
El parámetro "K" está grabado en la CV 54 y regula la influencia que la compensación de carga tendrá sobre el comportamiento de marcha. Cuanto mayor sea el valor de la CV más se compensarán las diferencias en las revoluciones del motor. Si la locomotora corre a tirones es necesario ajustar este parámetro. Para ello reduciremos el valor de la CV en de 5 unidades, probaremos la marcha de la locomotora y si hace falta repetiremos el proceso hasta que observemos que dejan de producirse tirones en la marcha de la locomotora.
El parámetro "K" está grabado en la CV 54 y regula la influencia que la compensación de carga tendrá sobre el comportamiento de marcha. Cuanto mayor sea el valor de la CV más se compensarán las diferencias en las revoluciones del motor. Si la locomotora corre a tirones es necesario ajustar este parámetro. Para ello reduciremos el valor de la CV en de 5 unidades, probaremos la marcha de la locomotora y si hace falta repetiremos el proceso hasta que observemos que dejan de producirse tirones en la marcha de la locomotora.
11.1.2.2. Parámetro "I" [CV 55]
El parámetro I informa al decoder de cuanta inercia tiene el motor. Los motores grandes con volantes de inercia tienen más inercia lógicamente que los más pequeños o los de campana. Cuando la locomotora vibra justo antes de parar o salta a velocidades bajas o simplemente no rueda con suavidad, debemos ajustar el parámetro I con la CV55. Para ello según el motor:
- Motores con pequeños volantes de inercia o sin ellos: Reduciremos en 5 unidades el valor de la CV comenzando con los valores por defecto para estos motores. Probamos y repetimos el proceso hasta que consigamos los resultados deseados.
- Motores con grandes volantes de inercia: Incrementaremos el valor de la CV en 5 unidades, comenzando con el valor por defecto, para dichos motores. Probamos y repetimos el proceso hasta que consigamos los resultados deseados.
El parámetro I informa al decoder de cuanta inercia tiene el motor. Los motores grandes con volantes de inercia tienen más inercia lógicamente que los más pequeños o los de campana. Cuando la locomotora vibra justo antes de parar o salta a velocidades bajas o simplemente no rueda con suavidad, debemos ajustar el parámetro I con la CV55. Para ello según el motor:
- Motores con pequeños volantes de inercia o sin ellos: Reduciremos en 5 unidades el valor de la CV comenzando con los valores por defecto para estos motores. Probamos y repetimos el proceso hasta que consigamos los resultados deseados.
- Motores con grandes volantes de inercia: Incrementaremos el valor de la CV en 5 unidades, comenzando con el valor por defecto, para dichos motores. Probamos y repetimos el proceso hasta que consigamos los resultados deseados.
11.1.2.3. Voltaje de referencia [CV 53]
La CV 53 configura el el voltaje de referencia EMF para las máximas revoluciones del motor. Este parámetro podría tener que ser adaptado de acuerdo al voltaje de la vía y a la eficiencia del motor.
Si el motor alcanza la velocidad máxima cuando el regulador de velocidad de la central aún está en la tercera parte de su recorrido y el resto de éste no influye en las revoluciones del motor debemos disminuir el valor de la CV 53 hasta ajustarlo. Para ello, reduciremos 5 u 8 puntos y probaremos la locomotora, y si es necesario seguiremos disminuyendo hasta que el motor alcance las revoluciones máximas cuando el regulador llegue al tope del recorrido. Por el contrario, si la locomotora se mueve demasiado lenta con el máximo del regulador de velocidad entonces hay que incrementar el valor de la CV 53, paso a paso hasta que la velocidad máxima es alcanzada.
La CV 53 configura el el voltaje de referencia EMF para las máximas revoluciones del motor. Este parámetro podría tener que ser adaptado de acuerdo al voltaje de la vía y a la eficiencia del motor.
Si el motor alcanza la velocidad máxima cuando el regulador de velocidad de la central aún está en la tercera parte de su recorrido y el resto de éste no influye en las revoluciones del motor debemos disminuir el valor de la CV 53 hasta ajustarlo. Para ello, reduciremos 5 u 8 puntos y probaremos la locomotora, y si es necesario seguiremos disminuyendo hasta que el motor alcance las revoluciones máximas cuando el regulador llegue al tope del recorrido. Por el contrario, si la locomotora se mueve demasiado lenta con el máximo del regulador de velocidad entonces hay que incrementar el valor de la CV 53, paso a paso hasta que la velocidad máxima es alcanzada.
11.1.2.4. Parámetro “K lento” [CV 52]
La CV 52 controla, por separado, el control de la ganancia para el sector de conducción lento de la velocidad en el paso 1. Si no estás satisfecho con el comportamiento cuando circula a velocidad baja o en el arranque, mientras que el comportamiento es correcto en los pasos de velocidad medios y altos, se debe incrementar el valor de la CV 52, aproximadamente, en 5 - 10 puntos con respecto al valor configurado en la CV 54.
La CV 52 controla, por separado, el control de la ganancia para el sector de conducción lento de la velocidad en el paso 1. Si no estás satisfecho con el comportamiento cuando circula a velocidad baja o en el arranque, mientras que el comportamiento es correcto en los pasos de velocidad medios y altos, se debe incrementar el valor de la CV 52, aproximadamente, en 5 - 10 puntos con respecto al valor configurado en la CV 54.
11.1.2.5. Parámetro "Corte K lento" [CV 51]
La CV51 determina en qué paso de velocidad interna se usa el valor definido en la CV 52. A partir del paso de velocidad mencionado aquí, el decodificador calcula una característica y aumenta la ganancia hasta el valor establecido en CV 54.
La CV51 determina en qué paso de velocidad interna se usa el valor definido en la CV 52. A partir del paso de velocidad mencionado aquí, el decodificador calcula una característica y aumenta la ganancia hasta el valor establecido en CV 54.
11.1.2.6. Influencia del control de carga a baja velocidad
En la CV 56 se define la fuerza del control de la compensación de carga para bajos pasos de velocidad. Si la locomotora no funciona suavemente en los pasos más bajos de velocidad, hay que reducir el valor de la CV 56.
En la CV 56 se define la fuerza del control de la compensación de carga para bajos pasos de velocidad. Si la locomotora no funciona suavemente en los pasos más bajos de velocidad, hay que reducir el valor de la CV 56.
11.1.3. Principio de medida de la EMF (Fuerza electromotriz)
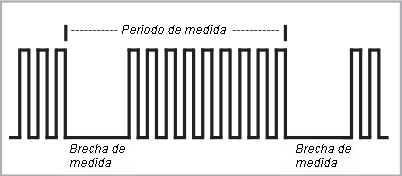
Por primera vez, es posible cambiar la medida de la EMF si es necesario, de acuerdo a obtener un mejor comportamiento de conducción en lomcomotoras problemáticas. Para que el Lokpilot 5 sea capaz de controlar el motor, éste es desconectado a regulares intervalos de tiempo y la EMF (voltaje devuelto por el motor) es medido. Si las medidas tomadas se realizan de una manera más frecuente, se obtiene un control más preciso del motor. La frecuencia de medida se denomina "Periodo de medida". Adicionalmente a la frecuencia de medida, también la longitud de cada ciclo individual de medida (BEMF periodo de muestreo) es importante. Cuanto más tiempo se mide, antes es posible que se produzcan perturbaciones: el fuego de las escobillas del conmutador, por ejemplo, afecta negativamente a la calidad de la medición. La duración de la medición en cada período de medición se denomina "Brecha de medición".
La siguiente figura ilustra la relación.
Por primera vez, es posible cambiar la medida de la EMF si es necesario, de acuerdo a obtener un mejor comportamiento de conducción en lomcomotoras problemáticas. Para que el Lokpilot 5 sea capaz de controlar el motor, éste es desconectado a regulares intervalos de tiempo y la EMF (voltaje devuelto por el motor) es medido. Si las medidas tomadas se realizan de una manera más frecuente, se obtiene un control más preciso del motor. La frecuencia de medida se denomina "Periodo de medida". Adicionalmente a la frecuencia de medida, también la longitud de cada ciclo individual de medida (BEMF periodo de muestreo) es importante. Cuanto más tiempo se mide, antes es posible que se produzcan perturbaciones: el fuego de las escobillas del conmutador, por ejemplo, afecta negativamente a la calidad de la medición. La duración de la medición en cada período de medición se denomina "Brecha de medición".
La siguiente figura ilustra la relación.
11.1.3.1. Periodo de medida [CV 116, CV117]
Con la CV 116, la longitud del periodo de medida a velocidad 1 puede ser configurado en pasos de 0,1milisegundos. El rango de valores de 50 a 200 permite periodos de medida de 5 a 20 milisegundos.
Con la CV 117, la longitud del periodo de medida en la marcha más alta puede ser configurada en pasos de 0,1 milisegundos. El rango de valores de 50 a 200 permite periodos de medida de 5 a 20 milisegundos. Normalmente, el periodo de frecuencia se incrementa con el incremento de velocidad (por ello menos medidas son hechas) de modo que se pueda alcanzar la máxima potencia del motor a alta velocidad. Para motores sin núcleo u otros motores de movimiento rápido con volante pequeño o sin volante, el período de medición se puede reducir para lograr un funcionamiento más suave.
Con la CV 116, la longitud del periodo de medida a velocidad 1 puede ser configurado en pasos de 0,1milisegundos. El rango de valores de 50 a 200 permite periodos de medida de 5 a 20 milisegundos.
Con la CV 117, la longitud del periodo de medida en la marcha más alta puede ser configurada en pasos de 0,1 milisegundos. El rango de valores de 50 a 200 permite periodos de medida de 5 a 20 milisegundos. Normalmente, el periodo de frecuencia se incrementa con el incremento de velocidad (por ello menos medidas son hechas) de modo que se pueda alcanzar la máxima potencia del motor a alta velocidad. Para motores sin núcleo u otros motores de movimiento rápido con volante pequeño o sin volante, el período de medición se puede reducir para lograr un funcionamiento más suave.
11.1.3.2. Brecha de medida [CV 118, CV 119]
Con la ayuda de CV 118, la longitud del intervalo de medición a la velocidad 1 se puede configurar en pasos de 0,1 milisegundos. El rango de valores de 10 a 40 permite intervalos de medición de 1 a 4 milisegundos.
En CV 119, la longitud de la brecha de medición en la marcha más alta se puede configurar en pasos de 0,1 milisegundos. El rango de valores de 10 a 40 permite intervalos de supresión de 1 a 4 milisegundos. Normalmente, la brecha de medición aumenta ligeramente a alta velocidad para obtener resultados de medición más precisos. Especialmente con motores antiguos, una brecha de medición más grande puede conducir a lecturas más precisas, ya que la interferencia se puede suavizar
Con la ayuda de CV 118, la longitud del intervalo de medición a la velocidad 1 se puede configurar en pasos de 0,1 milisegundos. El rango de valores de 10 a 40 permite intervalos de medición de 1 a 4 milisegundos.
En CV 119, la longitud de la brecha de medición en la marcha más alta se puede configurar en pasos de 0,1 milisegundos. El rango de valores de 10 a 40 permite intervalos de supresión de 1 a 4 milisegundos. Normalmente, la brecha de medición aumenta ligeramente a alta velocidad para obtener resultados de medición más precisos. Especialmente con motores antiguos, una brecha de medición más grande puede conducir a lecturas más precisas, ya que la interferencia se puede suavizar
11.2. Desconexión de la compensación de carga [CV 49, CV 2]
También se puede desactivar la compensación de carga estableciendo CV 49, Bit 0 a valor 0. Con el control de carga desactivado, la tensión de arranque en CV 2 debe aumentarse hasta que la locomotora comience a moverse en el paso de velocidad 1 o 2.
También se puede desactivar la compensación de carga estableciendo CV 49, Bit 0 a valor 0. Con el control de carga desactivado, la tensión de arranque en CV 2 debe aumentarse hasta que la locomotora comience a moverse en el paso de velocidad 1 o 2.
11.3. Adaptación de la frecuencia de control de carga [CV 9]
En los decodificadores LokPilot el control de carga funciona normalmente con 40 kHz. A veces puede resultar útil reducir esta frecuencia a la mitad:
- Para motores con poca potencia por alta inductividad.
- Si los supresores (como condensadores, inductancias, etc.) perturban el control de la carga pero no se pueden quitar (por ejemplo, algunas locomotoras Gützold® más antiguas). La frecuencia PWM se puede configurar en CV 9 como un múltiplo de 1000 Hz. El rango de 10 a 50 permite frecuencias de 10 kHz a 50 kHz.
En los decodificadores LokPilot el control de carga funciona normalmente con 40 kHz. A veces puede resultar útil reducir esta frecuencia a la mitad:
- Para motores con poca potencia por alta inductividad.
- Si los supresores (como condensadores, inductancias, etc.) perturban el control de la carga pero no se pueden quitar (por ejemplo, algunas locomotoras Gützold® más antiguas). La frecuencia PWM se puede configurar en CV 9 como un múltiplo de 1000 Hz. El rango de 10 a 50 permite frecuencias de 10 kHz a 50 kHz.
11.4. Configuración para motores C-Sine
Los decodificadores LokPilot con la interfaz 21MTC pueden accionar motores Softdrive C-Sine indirectamente a través de la placa de circuito instalada en la locomotora. El LokPilot puede generar todas las señales necesarias siempre que reajuste ciertas configuraciones: La compensación de carga debe desactivarse como se describe en el capítulo 11.2. La electrónica de control del motor también necesita una tensión lógica conmutada proporcionada por el LokPilot en la salida AUX4. Por tanto, AUX4 debe estar activo con la locomotora parada y en movimiento (¡en ambos sentidos!). Escriba los valores a continuación en los respectivos CV. Asegúrese de que CV 31 contenga el valor 16 y CV 32 el valor 8.
Los decodificadores LokPilot con la interfaz 21MTC pueden accionar motores Softdrive C-Sine indirectamente a través de la placa de circuito instalada en la locomotora. El LokPilot puede generar todas las señales necesarias siempre que reajuste ciertas configuraciones: La compensación de carga debe desactivarse como se describe en el capítulo 11.2. La electrónica de control del motor también necesita una tensión lógica conmutada proporcionada por el LokPilot en la salida AUX4. Por tanto, AUX4 debe estar activo con la locomotora parada y en movimiento (¡en ambos sentidos!). Escriba los valores a continuación en los respectivos CV. Asegúrese de que CV 31 contenga el valor 16 y CV 32 el valor 8.
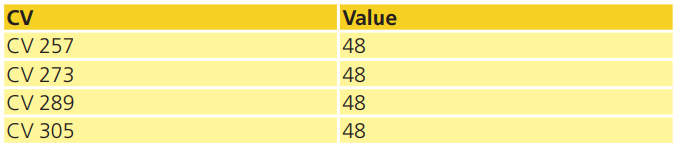
Utilice el LokProgrammer alternativamente para activar AUX4 para la locomotora estacionaria y para la locomotora en movimiento en ambos direcciones como se muestra en la siguiente figura.
Además, para ciertos modelos, la interfaz en serie (SUSI) debe ser activada ya que la electrónica de control recibe sus comandos a través de esta interfaz. Se activa la interfaz SUSI configurando el bit 3 en CV 124. Basado en el valor predeterminado para CV 124 (20), ahora se debe escribir 28 en la CV 124.
Desafortunadamente, hay otro obstáculo que superar: la placa de circuito del motor C-Sinus extrae demasiada energía del decodificador LokPilot. Si se han activado las secciones de freno RailCom o Märklin, es posible que haya algún comportamiento erróneo. Para rectificar esto hay que conectar un condensador de 470 µF entre U + y el común del decodificador como se muestra en la siguiente imagen:
Desafortunadamente, hay otro obstáculo que superar: la placa de circuito del motor C-Sinus extrae demasiada energía del decodificador LokPilot. Si se han activado las secciones de freno RailCom o Märklin, es posible que haya algún comportamiento erróneo. Para rectificar esto hay que conectar un condensador de 470 µF entre U + y el común del decodificador como se muestra en la siguiente imagen:
3. Calibrado automático del motor (válido para las versiones 4 y 5 del decoder Lokpilot)
(Es fundamental realizar las comprobaciones previas de motor y cinemática descritas anteriormente)
Este método a menudo genera una configuración bastante precisa del decoder pero debido a la diversidad y peculiaridades de cada motor puede ser necesario realizar el ajuste fino manual.
Antes de modificar las CV debemos apuntar su valor actual para poder volver a ponerlas como estaban en caso necesario.
1. Ubicaremos la locomotora en un tramo de vías preferiblemente niveladas y suficientemente largas como para permitir rodar la locomotora a máxima velocidad durante unos 2 segundos. Este movimiento se realizará automáticamente durante la calibración. Conviene instalar topes o algo similar en cada lado de la vía para evitar que la locomotora se salga.
2. Seleccionar la locomotora a calibrar en la central. Asegurarse de que la función F1 esté apagada y el mando de control de velocidad esté a 0. Poner el sentido de marcha correcto.
3. Escribir el valor 0 en la [CV54] (en la vía de programación o en la propia vía principal si el decoder de locomotora lo permite)
4. Ahora presionar el botón de función F1. La locomotora arrancará a máxima velocidad inmediatamente. Durante 1,5 segundos no será posible controlar la locomotora.
5. La locomotora parará automáticamente y entonces, los parámetros de compensación de carga identificados quedarán guardados en las CVs 51, 52, 53, 54 y 55.
El motor ha quedado calibrado pero si se desea, ahora se puede realizar el ajuste fino manual partiendo de estos valores calibrados automáticamente.
(Es fundamental realizar las comprobaciones previas de motor y cinemática descritas anteriormente)
Este método a menudo genera una configuración bastante precisa del decoder pero debido a la diversidad y peculiaridades de cada motor puede ser necesario realizar el ajuste fino manual.
Antes de modificar las CV debemos apuntar su valor actual para poder volver a ponerlas como estaban en caso necesario.
1. Ubicaremos la locomotora en un tramo de vías preferiblemente niveladas y suficientemente largas como para permitir rodar la locomotora a máxima velocidad durante unos 2 segundos. Este movimiento se realizará automáticamente durante la calibración. Conviene instalar topes o algo similar en cada lado de la vía para evitar que la locomotora se salga.
2. Seleccionar la locomotora a calibrar en la central. Asegurarse de que la función F1 esté apagada y el mando de control de velocidad esté a 0. Poner el sentido de marcha correcto.
3. Escribir el valor 0 en la [CV54] (en la vía de programación o en la propia vía principal si el decoder de locomotora lo permite)
4. Ahora presionar el botón de función F1. La locomotora arrancará a máxima velocidad inmediatamente. Durante 1,5 segundos no será posible controlar la locomotora.
5. La locomotora parará automáticamente y entonces, los parámetros de compensación de carga identificados quedarán guardados en las CVs 51, 52, 53, 54 y 55.
El motor ha quedado calibrado pero si se desea, ahora se puede realizar el ajuste fino manual partiendo de estos valores calibrados automáticamente.
