Decoder de Accesorios
Los decoder de accesorios se utilizan para activar o mover determinados elementos de la maqueta como la iluminación, los desvíos, las señales, la alimentación de vía, etc. Algunos de estos dispositivos además permiten mover otros elementos guiados por servos, motores, etc. Generalmente se dividen en 2 tipos, los que activan los elementos de forma permanente o los que lo hacen por un lapso más o menos corto de tiempo mientras dura la activación, aunque también hay dispositivos capaces de reprogramarse para actuar según convenga. En cuanto al protocolo de comunicación con la central, los hay que sólo usan el protocolo Motorola y los hay multiprotocolo, que pueden utilizar tanto Motorola como DCC. A continuación os mostramos los más habituales y prácticos:
Decoders Märklin K83 y K84
Estos decoder fabricados por Märklin utilizan exclusivamente su propio protocolo de comunicaciones llamado Motorola. La conexión es exclusivamente digital, es decir, se usa sólo la corriente digital de la vía tanto para la comunicación del protocolo como para la alimentación de los dispositivos conectados a sus salidas.
Estos decoder fabricados por Märklin utilizan exclusivamente su propio protocolo de comunicaciones llamado Motorola. La conexión es exclusivamente digital, es decir, se usa sólo la corriente digital de la vía tanto para la comunicación del protocolo como para la alimentación de los dispositivos conectados a sus salidas.
La diferencia entre el decoder K83 y el K84 es el tipo de Conmutación que utilizan para los dispositivos conectados. Temporal en el K83 y Permanente en el K84.
K83: Cuando tengamos que conectar un elemento que dispone de enclavamiento en las dos posiciones como por ejemplo un desvío o una Señal con relé biestable, necesitaremos usar el decoder K83 ya que este decoder simplemente actúa mientras está pulsado conmutando el relé o la bobina con enclavamiento para que cambie su posición a un lado u otro y se quede en esa posición aunque el decoder ya no continué alimentando el accesorio. La duración del pulso dependerá de la configuración que hayamos realizado en la central para dicho decoder es decir actúa mientras está pulsado y permanece activado durante unos milisegundos que se habrán programado en la central (entre 250 y 500 milisegundos suele ser suficiente para cambiar el estado de un desvío o una señal mecánica, por ejemplo)
K84: Cuando el elemento que queremos conectar necesita de alimentación permanente debido a que no dispone de un relé o bobina con enclavamiento como por ejemplo una bombilla o una señal semafórica sin relé, entonces usaremos el decoder K84 que una vez que se pulsa cambia a la posición correspondiente y continúa alimentando esa salida permanentemente.
K83: Cuando tengamos que conectar un elemento que dispone de enclavamiento en las dos posiciones como por ejemplo un desvío o una Señal con relé biestable, necesitaremos usar el decoder K83 ya que este decoder simplemente actúa mientras está pulsado conmutando el relé o la bobina con enclavamiento para que cambie su posición a un lado u otro y se quede en esa posición aunque el decoder ya no continué alimentando el accesorio. La duración del pulso dependerá de la configuración que hayamos realizado en la central para dicho decoder es decir actúa mientras está pulsado y permanece activado durante unos milisegundos que se habrán programado en la central (entre 250 y 500 milisegundos suele ser suficiente para cambiar el estado de un desvío o una señal mecánica, por ejemplo)
K84: Cuando el elemento que queremos conectar necesita de alimentación permanente debido a que no dispone de un relé o bobina con enclavamiento como por ejemplo una bombilla o una señal semafórica sin relé, entonces usaremos el decoder K84 que una vez que se pulsa cambia a la posición correspondiente y continúa alimentando esa salida permanentemente.
Programación:
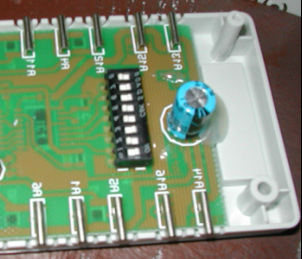
Estos decoder sólo admiten la programación de su dirección digital. Dicha dirección se asigna colocando en la posición correcta los microconmutadores del teclado de "piano de ratón" que incorpora en su interior.
Estos decoder sólo admiten la programación de su dirección digital. Dicha dirección se asigna colocando en la posición correcta los microconmutadores del teclado de "piano de ratón" que incorpora en su interior.
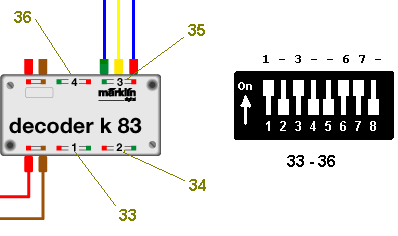
Cada Módulo dispone de cuatro salidas así que la dirección del módulo 1 tendrá las salidas 1,2,3,4 y el módulo con la dirección 2 tendrá las salidas 5,6,7,8 y así sucesivamente.
No hay que confundir el número del módulo con el número de las direcciones digitales de cada salida del módulo. En el ejemplo de la imagen podemos ver que estamos programando el módulo Nº 9 que contiene las direcciones 33, 34, 35 y 36. Sin embargo hay centrales que nombran las direcciones como 9,1 para referirse a la dirección digital 33, 9,2 para la dirección 34 y así sucesivamente. Para calcular mentalmente cuales son las 4 direcciones de un módulo concreto sabiendo el Nº del módulo, sólo tenemos hacer el siguiente cálculo simple Nº de módulo 9 x 4 = 36 que es la última salida del módulo y 36 - 3 = 32 que es la primera salida del módulo. Al revés, conociendo la dirección digital 35 por ejemplo, 35/4 = 9x4 -1, es decir la 3ª salida del módulo 9.
No hay que confundir el número del módulo con el número de las direcciones digitales de cada salida del módulo. En el ejemplo de la imagen podemos ver que estamos programando el módulo Nº 9 que contiene las direcciones 33, 34, 35 y 36. Sin embargo hay centrales que nombran las direcciones como 9,1 para referirse a la dirección digital 33, 9,2 para la dirección 34 y así sucesivamente. Para calcular mentalmente cuales son las 4 direcciones de un módulo concreto sabiendo el Nº del módulo, sólo tenemos hacer el siguiente cálculo simple Nº de módulo 9 x 4 = 36 que es la última salida del módulo y 36 - 3 = 32 que es la primera salida del módulo. Al revés, conociendo la dirección digital 35 por ejemplo, 35/4 = 9x4 -1, es decir la 3ª salida del módulo 9.
Tabla de direcciones digitales para los decoder de accesorios K83, K84 y compatibles:
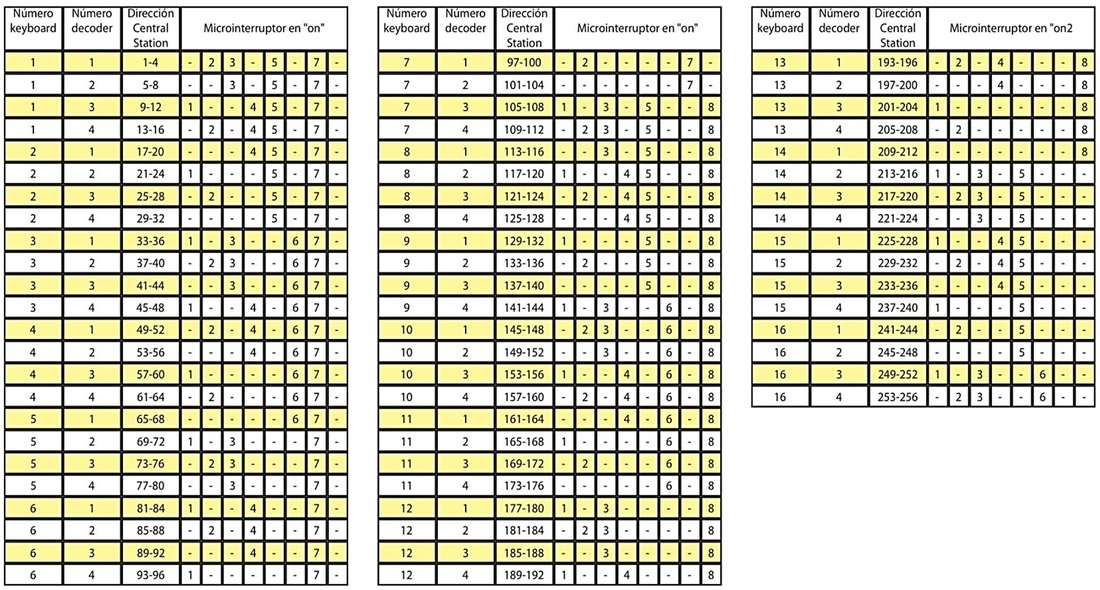
En la imagen se ve la posición de las teclas del piano de ratón para las primeras 256 direcciones digitales que corresponden a 64 módulos de 4 salidas cada uno. En esta imagen se ordenan por Keyboards 6040 de Märklin, en total 16 keyboards, cada keyboard maneja 4 decoder con 4 salidas o direcciones digitales cada uno. Märklin reserva los Keyboard 14 y 15 para el control de rotondas; el 15 para la primera rotonda y el 14 por si hay una segunda rotonda en la maqueta. Si vamos a instalar alguna de ellas va a ser muy conveniente no usar las direcciones digitales de estos Keyboard para otras cosas. Puedes ver en detalle la instalación, digitalización y programación de rotondas en nuestro artículo "Rotonda Märklin 7286".
Nuevos decoder Märklin Motorola y DCC m83 y m84
Estos decoder admiten el direccionamiento por piano de ratón o por CV en la vía de programación. Admite la programación de algunas CV del formato DCC aparte de la dirección digital.
El 60831 M83 sería el equivalente al antiguo K83 y el 60841 M84 sería el equivalente al antiguo K84, con la diferencia que los nuevos incorporan además el protocolo DCC con la posibilidad de programar algunas CV's con características especiales, y la opción de alimentación separada analógica/digital.
Estos decoder admiten el direccionamiento por piano de ratón o por CV en la vía de programación. Admite la programación de algunas CV del formato DCC aparte de la dirección digital.
El 60831 M83 sería el equivalente al antiguo K83 y el 60841 M84 sería el equivalente al antiguo K84, con la diferencia que los nuevos incorporan además el protocolo DCC con la posibilidad de programar algunas CV's con características especiales, y la opción de alimentación separada analógica/digital.

|

|
|
60831 Decodificador m83
Receptor para conmutar agujas, señales y vías de desenganche. Compatible con los formatos digitales Motorola y DCC. Ajuste de la dirección digital mediante el interruptor de codificación o mediante la vía programable. En formato Motorola abarca hasta la dirección 320 y en DCC hasta la 2040. Posee 8 salidas que se pueden manejar por separado. Configuración previa para manejar 4 agujas. Se encuentran otras funciones como la conmutación de iluminación (atenuación), con un comportamiento de conexión determinado (como p.ej.: iluminación de la carretera) así como la iluminación de las cabinas. Es posible alimentarlo desde fuentes externas p.ej.: mediante el 60361. Los decodificadores 60831 y 60841 se pueden alinear como se desee. Para los accionamientos por motor se precisa disponer de un set de ampliación 60821 por salida. La conexión se realiza por tornillos. Intensidad de corriente máxima de 3A. Ambos decoder m83 y m84 disponen de: - Muchas posibilidades de conmutación nuevas. - Indicaciones Led para reconocimiento rápido de los modos de servicio - Posibilidad de actualización |
60841 Decodificador m84
Receptor para conectar y desconectar corriente permanente para la iluminación, los motores, las señales luminosas de Hobby (74371, 74380, 74391) y otros accesorios eléctricos. Compatible con los formatos digitales Motorola y DCC. Ajuste de la dirección digital mediante el interruptor de codificación o mediante la vía programable. En formato Motorola abarca hasta la dirección 320 y en DCC hasta la 2040. Posee 4 relés de conmutación galvánica por separado de los consumidores. Con la fuente de alimentación 66361 se puede alcanzar el estado biestable del relé y almacenar el estado de conmutación. Las señales luminosas de Hobby se pueden controlar con las mismas posibilidades de conmutación de la corriente de tracción. Además el m84 tiene 8 entradas que permiten la conmutación manual del relé (de forma similar al conmutador 7244). Los decodificadores 60831 y 60841 se pueden alinear como se desee. Para los accionamientos por motor se precisa disponer de un set de ampliación 60821 por salida. La conexión se realiza por tornillos. Intensidad de corriente máxima de 3A. |
|
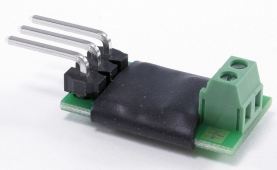
60821 Set de ampliación para el decoder m83
Platina de conexión en serie del cambio de agujas accionado por motor para el decoder m83. Para utilizar cambios de agujas accionados por motor con desconexión en el tope final. Sólo se puede utilizar con el decoder m83 (60831). Si se emplea con el m83 se puede programar la velocidad de ajuste y aproximación lenta. |
|
|
Decoder SwitchPilot
Este es un decoder fabricado por ESU que podríamos llamar "Multidecoder" por su enorme versatilidad comparado con los decoder de Märklin o Viessmann. El SWP (SwitchPilot) puede ser utilizado como un decoder 100% compatible con los Märklin K83 o K84 con la ventaja de que dispone de un botón con 3 posiciones para cambiar el modo en que debe actuar; K83, K84 o USER. Este conmutador permite asignar un modo de funcionamiento K83 o K84 a las 4 salidas a la vez o en el modo USER (DCC) permite configurar K83 o K84 en cada salida independientemente. Además de las 4 salidas para accesorios electromagnéticos, incorpora 2 salidas extra para servos, de manera que con un único dispositivo podemos conectar a la vez a sus salidas y de manera independiente, señales mecánicas o desvíos con bobinas o relés, señales luminosas sin relés, servos, e incluso motores analógicos o motores PWM. Además incorpora dos conexiones extra en cada salida (5 en vez de 3) que sirven para informar sobre si el accesorio, por ejemplo el desvío, a alcanzado su posición final o no. Esta comunicación la hace vía Rail-Com para las centrales que usen dicho protocolo (como la ECos). Una autentica "Navaja Suiza" de los decoder de accesorios.
Protocolos:
Como ya hemos dicho, en cuanto a la comunicación con la central, los Switchpilot son Multiprotocolo ya que admiten los protocolos Motorola. DCC y además dispone del protocolo RailCom de comunicación bidireccional con la central con importantes ventajas como la de leer el valor de las CV's en la vía principal o la de retro alimentar a la central si se ha alcanzado o no la posición final de cada estado.
Como ya hemos dicho, en cuanto a la comunicación con la central, los Switchpilot son Multiprotocolo ya que admiten los protocolos Motorola. DCC y además dispone del protocolo RailCom de comunicación bidireccional con la central con importantes ventajas como la de leer el valor de las CV's en la vía principal o la de retro alimentar a la central si se ha alcanzado o no la posición final de cada estado.
Conexiones:
Ejemplo de conexión de Alimentación
Tres Carriles: Conexión alimentación Switchpilot
|
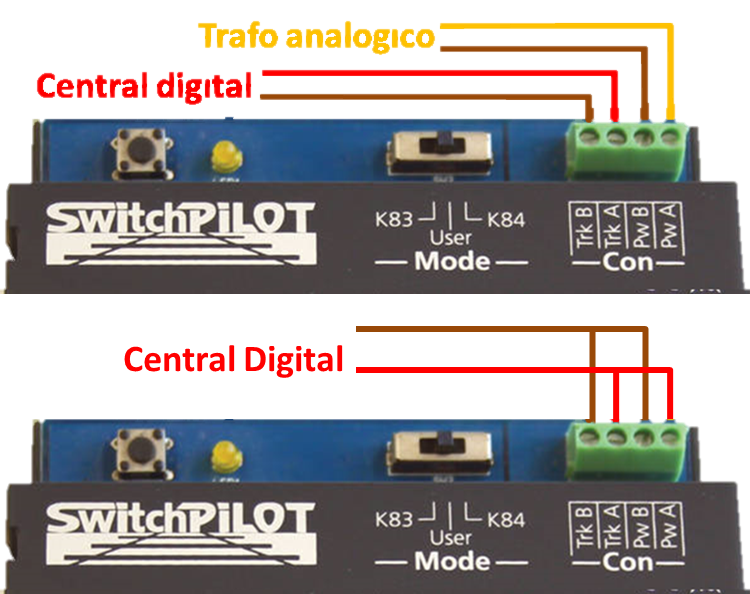
El tipo de alimentación está separada de manera que puede ser alimentado con corriente digital para la comunicación del protocolo y funcionamiento del decoder y por otro lado con corriente analógica AC o CC para la alimentación de los dispositivos conectados a sus salidas, aunque si se quiere se pueden puentear ambas entradas de alimentación y usar la alimentación digital para ambas cosas.
Para puentear ambas entradas se conecta la salida Track A con Power A y Track B con Power B, y una vez puenteadas se conecta a la central digital. Esto hace que todo el consumo tanto del control digital como de los accesorios que se conecten al decoder se alimenten sólo con corriente digital. |
Ejemplo de conexión de un accesorio de doble bobina (desvío simple):
 Tres Carriles: Conexión Switchpilot con desvío simple Märklin
Tres Carriles: Conexión Switchpilot con desvío simple Märklin
La conexión de accesorios estándar como por ejemplo un desvío se realiza como se ve en el gráfico. Cable Azul/rojo en la conexión OUT A, cable Azul/verde en la conexión OUT B y el cable común Amarillo en la conexión C.
La conexión Out A corresponde al estado del desvío en curva y la conexión Out B corresponde al estado del desvío en recto.
Adicionalmente en el caso de usar una central digital ECos se puede usar la señal de retroalimentación, sólo hay que puentear la salida FB-A con OUT A y FB-B con OUT B. Esto sirve para que el decoder envíe una señal a la central ECos indicando cuando la bobina del desvío ha llegado a su posición final, en cada lado. Si la aguja del desvío se moviera accidentalmente, al empujar la bobina y cambiarla de posición, se enviaría una señal a la central, via Rail-Com que la central interpreta como posición incorrecta del desvío y lo marca en el display con un triangulo amarillo de advertencia. Para que ello funcione, es necesario que esté activado la comunicación Rail-Com tanto en el SWP como en la central y que el protocolo del SWP esté configurado en la central como DCC con Rail-Com. (ver más abajo como se configura Rail-Com en el SWP mediante CV's).
La conexión Out A corresponde al estado del desvío en curva y la conexión Out B corresponde al estado del desvío en recto.
Adicionalmente en el caso de usar una central digital ECos se puede usar la señal de retroalimentación, sólo hay que puentear la salida FB-A con OUT A y FB-B con OUT B. Esto sirve para que el decoder envíe una señal a la central ECos indicando cuando la bobina del desvío ha llegado a su posición final, en cada lado. Si la aguja del desvío se moviera accidentalmente, al empujar la bobina y cambiarla de posición, se enviaría una señal a la central, via Rail-Com que la central interpreta como posición incorrecta del desvío y lo marca en el display con un triangulo amarillo de advertencia. Para que ello funcione, es necesario que esté activado la comunicación Rail-Com tanto en el SWP como en la central y que el protocolo del SWP esté configurado en la central como DCC con Rail-Com. (ver más abajo como se configura Rail-Com en el SWP mediante CV's).
Problema conocido: Varios usuarios hemos notado que a veces la información Rail-Com en la central deja de ser correcta con respecto a la posición de los desvíos y hemos descubierto que si uno de los switchpilot está averiado, la información Rail-Com procedente de este switchpilot y de todos los posteriores respecto a su dirección digital tampoco funcionarán correctamente. Una vez sustituido el Swicthpilot que no funciona bien, los demás vuelven a funcionar.
Ejemplo de conexión de un desvío triple con dos motores de doble bobina independientes:
Tres Carriles: Conexión Switchpilot para desvío Triple Märklin
|
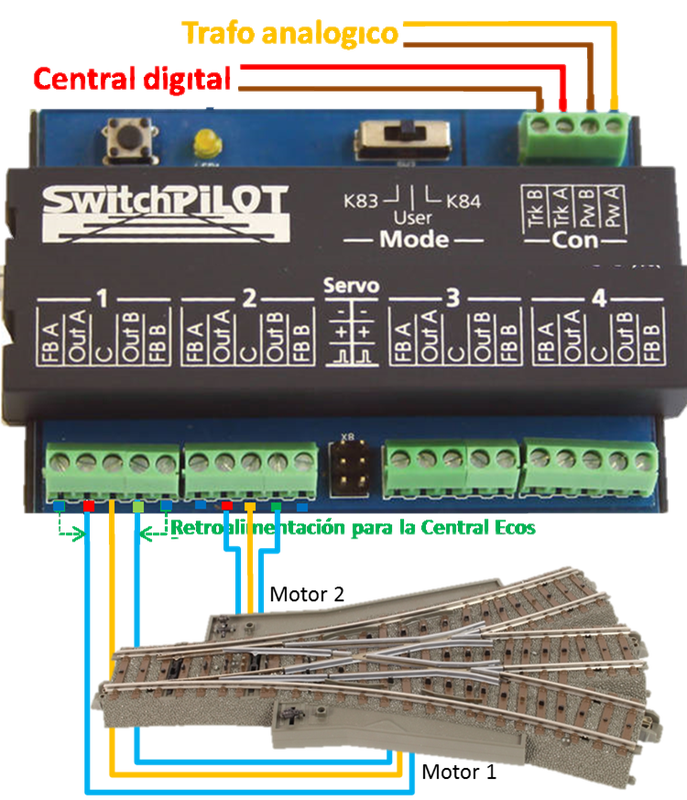
El desvío triple tiene 2 agujas cada una de las cuales está controlada por su propio motor, así pues tiene 2 motores independientes que deben actuar conjuntamente y por lo tanto necesitan 2 salidas del decoder que obligatoriamente han de ser consecutivas. (en el ejemplo de la imagen hemos usado la salida 1 y la salida 2 del decoder Switchpilot).
Los cables del motor de la aguja mas interna (motor 1) se conectan a la salida 1: el cable para curva en el rojo o "OutA", el cable para recto en el verde o "OutB" y el amarillo en el centro de ambos "C". Los cables de la aguja más externa (motor 2) se conectan en el mismo orden pero a la salida 2. (adicionalmente si se desea, se pueden conectar los puentes FBA con OutA y FBB con OutB, para la retro alimentación Rail-Com en ambas salidas) 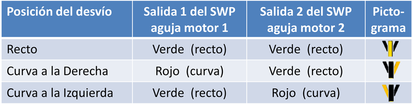
|
Ejemplo de conexión de una señal ferroviaria:
Para una señal de 2 aspectos, la conexión Out A correspondería al aspecto Rojo de la señal y la conexión Out B correspondería al aspecto verde. La conexión C es para el polo común. En caso de conectar una señal con 3 o más aspectos será necesario usar las conexiones de la siguiente salida consecutiva.
Ver las diferentes conexiones posibles, según el tipo de señal, en la sección Señales Märklin
Para una señal de 2 aspectos, la conexión Out A correspondería al aspecto Rojo de la señal y la conexión Out B correspondería al aspecto verde. La conexión C es para el polo común. En caso de conectar una señal con 3 o más aspectos será necesario usar las conexiones de la siguiente salida consecutiva.
Ver las diferentes conexiones posibles, según el tipo de señal, en la sección Señales Märklin
Comprobar el estado de las salidas del decoder
|
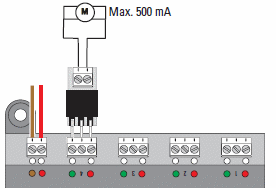
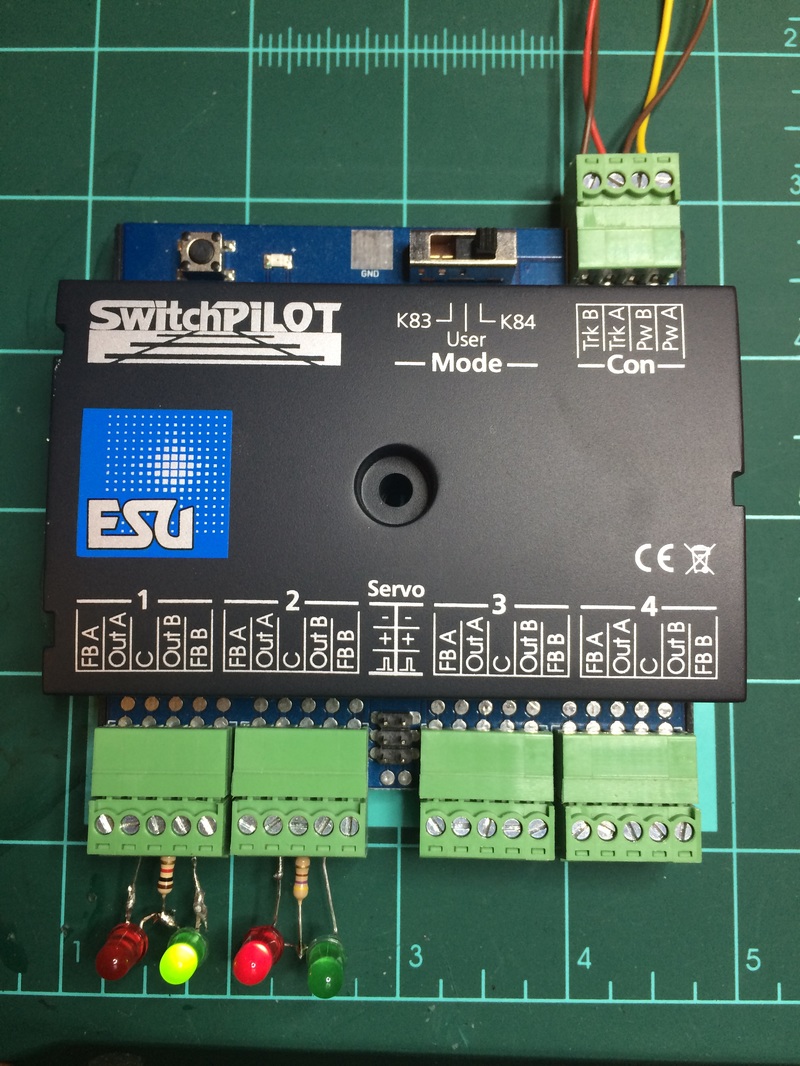
Con unos leds conectados a las salidas del decoder (2 salidas consecutivas) podremos comprobar cómo y cuales de estas salidas se activan y desactivan, según el pictograma o elemento de control que hayamos seleccionado en la central. Esto nos ayudará en caso de duda a la hora de conectar los cables de los accesorios más complejos.
Puedes pinchar en la imagen para ampliarla y ver como se conectan. Si lo necesitas, también puedes ver cómo se construye este simple "Tester" de decoders de accesorios en nuestra sección de circuitos electrónicos. Lógicamente funciona con cualquier decoder y central digital. |
Ejemplo de conexión para servos:
 Tres Carriles: Conexión Switchpilot para servos
Tres Carriles: Conexión Switchpilot para servos
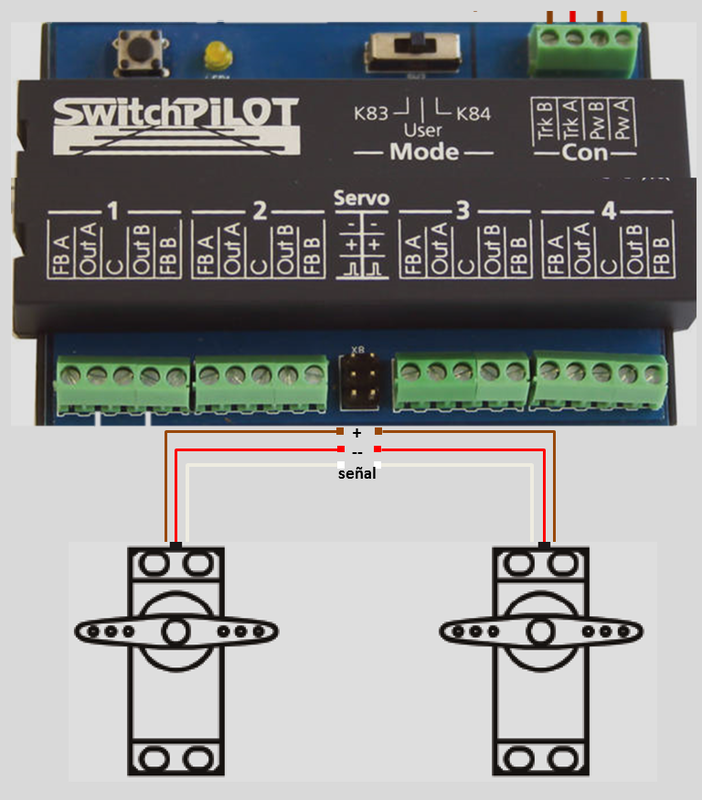
Al Switchpilot estándar se le pueden conectar adicionalmente hasta 2 servos. Para ello incluye 2 conectores de 3 pines compatibles con la conexión "Futaba", es decir el pin de arriba es el positivo (+), el del medio el negativo (-) y el de abajo es la señal o "pulse".
Los servos deben ser del tipo Futaba o compatibles; ESU, Graupner, etc. que permiten una duración ajustable del pulso entre 1 y 2 milisegundos, impulso positivo.
Alimentación a 5v estabilizados y una potencia máxima por servo de 250mA (500mA durante 20 segundos).
Los ajustes del servo se indican más abajo en el apartado sobre programación, en "Salidas para Servos".
Los límites de recorrido del servo a izquierda y derecha pueden programarse mediante CV's al igual que la velocidad de giro. El modo de hacerlo se explica más abajo en "salidas para servos".
Los servos deben ser del tipo Futaba o compatibles; ESU, Graupner, etc. que permiten una duración ajustable del pulso entre 1 y 2 milisegundos, impulso positivo.
Alimentación a 5v estabilizados y una potencia máxima por servo de 250mA (500mA durante 20 segundos).
Los ajustes del servo se indican más abajo en el apartado sobre programación, en "Salidas para Servos".
Los límites de recorrido del servo a izquierda y derecha pueden programarse mediante CV's al igual que la velocidad de giro. El modo de hacerlo se explica más abajo en "salidas para servos".
Programación
El SWP no utiliza piano de ratón como los K83 y K84 de Märklin sino que se programa como un decoder de locomotora, mediante CVs. pero manteniendo la compatibilidad total con el método antiguo de direccionamiento de Märklin, así que admite hasta 252 direcciones digitales en Motorola pero puede llegar hasta las 2040 en DCC.
Programación de la dirección digital (de accesorios electromagnéticos y de los servos)
Hay dos métodos para realizar la programación de la dirección digital; usando el botón de programación o escribiendo un valor en las CV de la dirección digital. A continuación explicamos los dos métodos tanto para los accesorios electromagnéticos como para las salidas para servos.
1. Usando el botón de programación
1.1 Programación salidas accesorios electromagnéticos
Pulsando el botón de programación 2 segundos:
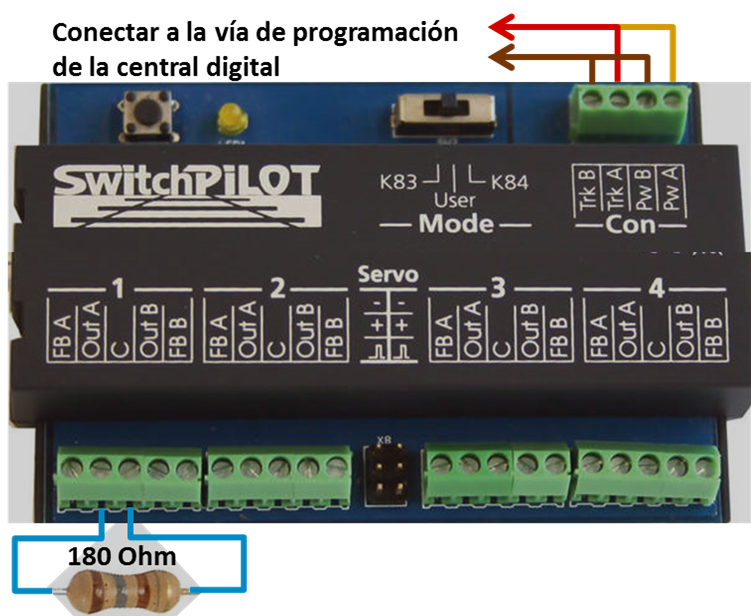
Las 4 salidas (de 2 estados A y B cada una) para accesorios electromagnéticos se pueden programar rápidamente en la vía principal o en la vía de programación tal como se muestra en la imagen. (también se puede conectar con la alimentación separada; digital y analógica):
 Tres Carriles: Conexión Switchpilot para programación
Tres Carriles: Conexión Switchpilot para programación
- 1. puentear temporalmente las entradas de alimentación digital y analógica sólo con corriente digital por comodidad. (también se puede conectar cada una por separado)
- 2. conectar una resistencia de 180 Ohm. (u otra carga semejante como una bombilla) a la salida 1 del decoder en los conectores "C" y "Out A".
- 3. pulsar el botón de programación sólo 2 segundos , entonces el led del SWP parpadeará intermitentemente de forma regular, lo que indica que el SWP se encuentra listo para programar las 4 salidas.
- 4. Pulsar en la central el pictograma que controlará la salida 1 de este módulo cuya dirección digital debe corresponder con la primera salida de un módulo de 4 (ver tabla de direcciones digitales más arriba en esta página)
- 5. Si el decoder se ha programado correctamente el led testigo se apagará.
Hecho esto ya tendremos programada la dirección digital, no sólo para la salida 1 sino también de manera automática para las 4 salidas consecutivas del módulo.
- 2. conectar una resistencia de 180 Ohm. (u otra carga semejante como una bombilla) a la salida 1 del decoder en los conectores "C" y "Out A".
- 3. pulsar el botón de programación sólo 2 segundos , entonces el led del SWP parpadeará intermitentemente de forma regular, lo que indica que el SWP se encuentra listo para programar las 4 salidas.
- 4. Pulsar en la central el pictograma que controlará la salida 1 de este módulo cuya dirección digital debe corresponder con la primera salida de un módulo de 4 (ver tabla de direcciones digitales más arriba en esta página)
- 5. Si el decoder se ha programado correctamente el led testigo se apagará.
Hecho esto ya tendremos programada la dirección digital, no sólo para la salida 1 sino también de manera automática para las 4 salidas consecutivas del módulo.
1.2 Programación de la dirección digital de las salidas para Servos
Pulsando el botón de programación 4 segundos:
- 1. Pulsar el botón de programación durante 4 segundos (en vez de 2 segundos como en las salidas estandar) entonces el led testigo, parpadeará asimétricamente para indicar que estamos actuando sobre los servos. Lógicamente debe haber, al menos, un servo conectado a la primera salida de servos.
- 2. Pulsar el pictograma o botón de la central que conmutará ese servo y que previamente hemos configurando en la central con la primera dirección digital de un módulo de 4 que queremos que controle la primera salida de servos del SWP (aunque sólo haya 2 disponibles en el caso del SWP normal). En ese caso, a ambos servos se le asignarán automáticamente sus direcciones digitales consecutivas. (ver tabla de direcciones digitales más arriba en esta página)
- 3. Cuando el led testigo deje de parpadear sabremos que el decoder SWP ha quedado programado.
Pulsando el botón de programación 4 segundos:
- 1. Pulsar el botón de programación durante 4 segundos (en vez de 2 segundos como en las salidas estandar) entonces el led testigo, parpadeará asimétricamente para indicar que estamos actuando sobre los servos. Lógicamente debe haber, al menos, un servo conectado a la primera salida de servos.
- 2. Pulsar el pictograma o botón de la central que conmutará ese servo y que previamente hemos configurando en la central con la primera dirección digital de un módulo de 4 que queremos que controle la primera salida de servos del SWP (aunque sólo haya 2 disponibles en el caso del SWP normal). En ese caso, a ambos servos se le asignarán automáticamente sus direcciones digitales consecutivas. (ver tabla de direcciones digitales más arriba en esta página)
- 3. Cuando el led testigo deje de parpadear sabremos que el decoder SWP ha quedado programado.
2. Programar modificando los valores en las CV's
También se podrá modificar el valor de las direcciones digitales sin tener que hacerlo pulsando el pictograma o botón de la central, podemos hacerlo escribiendo el valor directamente en las CV's del módulo y además podemos hacerlo en la vía de programación u "On Main", es decir in situ, en la vía principal, sin desmontar el dispositivo del lugar donde se haya ubicado, Esto se hará escribiendo los valores directamente en las CVs. desde la central.Por ejemplo la ECOS o la CS2 con la última versión de software pueden hacer esto. (la CS2 al no disponer de Rail-com puede escribir valores en las CV's pero no puede leerlos On Main, lo cual no es imprescindible ya que si podremos leerlos en la vía de programación).
La programación por CVs no se limita exclusivamente a la dirección digital sino que cada una de sus salidas pueden ser modificadas para permitir varios efectos como modificar independientemente en cada una de ellas el tipo de conmutación; por pulso o permanente, K83, K84, así como varios efectos de intermitencias, cruce de San Andrés, efecto de encendido y apagado suave de luces, alimentación de motores PWM, o incluso analógicos, o gestión de los corazones de los desvíos para los bucles de retorno en vías de corriente continua CC.
También se podrá modificar el valor de las direcciones digitales sin tener que hacerlo pulsando el pictograma o botón de la central, podemos hacerlo escribiendo el valor directamente en las CV's del módulo y además podemos hacerlo en la vía de programación u "On Main", es decir in situ, en la vía principal, sin desmontar el dispositivo del lugar donde se haya ubicado, Esto se hará escribiendo los valores directamente en las CVs. desde la central.Por ejemplo la ECOS o la CS2 con la última versión de software pueden hacer esto. (la CS2 al no disponer de Rail-com puede escribir valores en las CV's pero no puede leerlos On Main, lo cual no es imprescindible ya que si podremos leerlos en la vía de programación).
La programación por CVs no se limita exclusivamente a la dirección digital sino que cada una de sus salidas pueden ser modificadas para permitir varios efectos como modificar independientemente en cada una de ellas el tipo de conmutación; por pulso o permanente, K83, K84, así como varios efectos de intermitencias, cruce de San Andrés, efecto de encendido y apagado suave de luces, alimentación de motores PWM, o incluso analógicos, o gestión de los corazones de los desvíos para los bucles de retorno en vías de corriente continua CC.
2.1 Requisitos para programar las CV's con la ECOS y con la CS2
El decoder SwitchPilot se ha de configurar en la ECOS con el protocolo DCC o DCC con Railcom y sus CV's se pueden programar desde la pantalla específica de configuración de CV's de que dispone esta central. Si se activan las opciones Rail-com tanto en la central como en el SWP se podrá reprogramar el SWP directamente On-Main tanto para escribir como para leer las CV's.
En el caso de la CS2, habrá que crear un pictograma de accesorios en la central con el valor "Multidecoder" en el campo "Decoder Type" y el protocolo DCC. Ahora ya se pueden programar las CV pulsando en [Configuración] en el botón [CV]. Ahí se podrán escribir valores en las CV que queremos modificar pero dará error a la hora de leer los valores escritos si el decoder SWP está en la vía principal (On-Main) ya que el protocolo de bidireccionalidad del SWP es Rail-Com y la CS2 no dispone de él, y no puede leerlos pero los valores se habrán escrito correctamente. Si se programa el decoder en la vía de programación si se deberían poder leer las CV's. Por esto es recomendable aunque no imprescindible programar el SWP con la CS2 o con otras Centrales sin Rail-com en la vía de programación.
El decoder SwitchPilot se ha de configurar en la ECOS con el protocolo DCC o DCC con Railcom y sus CV's se pueden programar desde la pantalla específica de configuración de CV's de que dispone esta central. Si se activan las opciones Rail-com tanto en la central como en el SWP se podrá reprogramar el SWP directamente On-Main tanto para escribir como para leer las CV's.
En el caso de la CS2, habrá que crear un pictograma de accesorios en la central con el valor "Multidecoder" en el campo "Decoder Type" y el protocolo DCC. Ahora ya se pueden programar las CV pulsando en [Configuración] en el botón [CV]. Ahí se podrán escribir valores en las CV que queremos modificar pero dará error a la hora de leer los valores escritos si el decoder SWP está en la vía principal (On-Main) ya que el protocolo de bidireccionalidad del SWP es Rail-Com y la CS2 no dispone de él, y no puede leerlos pero los valores se habrán escrito correctamente. Si se programa el decoder en la vía de programación si se deberían poder leer las CV's. Por esto es recomendable aunque no imprescindible programar el SWP con la CS2 o con otras Centrales sin Rail-com en la vía de programación.
2.2 Las CV más importantes son las siguientes:
La CV1 sirve para asignar la Dirección digital, se usa junto con la CV9. Los valores de 1-63 en CV1 indican el Nº del módulo de 4 salidas de modo que se asignan hasta 63x4=252 direcciones. O sea: el valor 1 para las salidas 1-4, el valor 2 para las salidas 5 a 8 y así sucesivamente, igual que en la tabla de direcciones digitales Motorola que mostramos más arriba en esta página.
La CV8 permite resetear el Decoder a los valores de fábrica escribiendo en ella el valor 8.
La CV 9 funciona en conjunción con la CV1 y es la dirección digital extendida. Valores entre 0 a 7. Así, por cada valor de la CV9 hay un rango completo de la CV1 lo que aumenta el número de direcciones digitales hasta las 2044 en DCC
Las CV 3, 4, 5 y 6 corresponden a las Salidas 1, 2, 3 y 4 respectivamente y cada una pude contener los valores siguientes:
La CV1 sirve para asignar la Dirección digital, se usa junto con la CV9. Los valores de 1-63 en CV1 indican el Nº del módulo de 4 salidas de modo que se asignan hasta 63x4=252 direcciones. O sea: el valor 1 para las salidas 1-4, el valor 2 para las salidas 5 a 8 y así sucesivamente, igual que en la tabla de direcciones digitales Motorola que mostramos más arriba en esta página.
La CV8 permite resetear el Decoder a los valores de fábrica escribiendo en ella el valor 8.
La CV 9 funciona en conjunción con la CV1 y es la dirección digital extendida. Valores entre 0 a 7. Así, por cada valor de la CV9 hay un rango completo de la CV1 lo que aumenta el número de direcciones digitales hasta las 2044 en DCC
Las CV 3, 4, 5 y 6 corresponden a las Salidas 1, 2, 3 y 4 respectivamente y cada una pude contener los valores siguientes:
- Valor 0 para el modo K83 es decir que la salida está activada mientras se pulsa y queda desactivada al dejar de pulsar
- Valor 1 para el modo pulso de PEKO
- Valor 2 a 31 para el modo pulso de manera que el pulso durará 65ms multiplicado por el valor asignado
- Valor 32 a 63 para intermitencia alternativa de las 2 posiciones Rojo/verde de la salida. La velocidad de intermitencia será el valor asignado multiplicado por 130ms.
- Valor 64 para el modo K84, es decir conmutación permanente (biestable)
2.3 Rail-Com
El protocolo Railcom permite leer el valor de las CVs del SWP en una central que disponga de este protocolo (como la ECOS) lo que facilita la programación On Main, esto quiere decir que podemos leer los valores del decoder y programar todas las CV's sin necesidad de retirar el decoder de su ubicación en la maqueta. Además cada una de las 4 salidas del decoder dispone de las tradicionales 3 conexiones (Verde, Común, Rojo) y de 2 conexiones más (una al lado del Rojo (FbA) y otra al lado del Verde (FbB) que se utilizan para informar a la central vía Rail-Com de si un desvío, tipo Märklin por ejemplo, se ha movido y ha llegado a su posición final, leyendo el estado del "fin de carrera" del motor del desvío. Para ello hay que conectar las salidas Out A con FbA y Out B con FbB y que la central disponga de software para reconocer la información Rail-Com correspondiente como por ejemplo la ECos.
CVs para el protocolo RailCom
Las CV28 y 29 activan el protocolo Railcom con los valores (CV28=6, CV29=136) El valor 0 en CV28 lo desactiva
La CV33 activa las salidas que detectan el fin de carrera de los motores de desvío enviando el estatus a la central vía pero para ello es necesario que esas posiciones de las salidas correspondientes estén físicamente conectadas en el SWP tal como hemos explicado antes.
El protocolo Railcom permite leer el valor de las CVs del SWP en una central que disponga de este protocolo (como la ECOS) lo que facilita la programación On Main, esto quiere decir que podemos leer los valores del decoder y programar todas las CV's sin necesidad de retirar el decoder de su ubicación en la maqueta. Además cada una de las 4 salidas del decoder dispone de las tradicionales 3 conexiones (Verde, Común, Rojo) y de 2 conexiones más (una al lado del Rojo (FbA) y otra al lado del Verde (FbB) que se utilizan para informar a la central vía Rail-Com de si un desvío, tipo Märklin por ejemplo, se ha movido y ha llegado a su posición final, leyendo el estado del "fin de carrera" del motor del desvío. Para ello hay que conectar las salidas Out A con FbA y Out B con FbB y que la central disponga de software para reconocer la información Rail-Com correspondiente como por ejemplo la ECos.
CVs para el protocolo RailCom
Las CV28 y 29 activan el protocolo Railcom con los valores (CV28=6, CV29=136) El valor 0 en CV28 lo desactiva
La CV33 activa las salidas que detectan el fin de carrera de los motores de desvío enviando el estatus a la central vía pero para ello es necesario que esas posiciones de las salidas correspondientes estén físicamente conectadas en el SWP tal como hemos explicado antes.
2.4 Salidas para Servos
Además de las 4 salidas habituales, el SWP estándar dispone de 2 salidas extra para conectar 2 servos que pueden ser accionados como si se trataran de 2 salidas normales. Mediante las CVs correspondientes, cada una de estas 2 salidas puede ser programada variando la velocidad de giro del servo así como los límites de movimiento a izquierda y derecha.
La dirección digital que se programe para los servos es totalmente independiente de la dirección digital que se asigne a las salidas para accesorios electromagnéticos como si de dos decoders distintos se tratara
CVs para el ajuste de los servos:
Las CV 35 y 36 sirven para asignar la dirección digital de las salidas para servos (se asignan 4 salidas por módulo aunque físicamente solo hay 2 en el SWP estándar. En el SWP Servo si existen las 4 salidas para servos). En concreto la CV35 se utiliza para las direcciones cortas(módulos de 4 salidas del 1 al 63) y con la CV36 podemos ampliar el rango y usar direcciones largas (el valor 8 por defecto deshabilita las direcciones largas. Por cada valor de 0 a 7 se activa el siguiente rango de 1 a 63 módulos).
Las CV37, 38 y 39 sirven para ajustar los valores de la salida para Servo 1:
Las CV 43, 44 y 45 idem para la salida de Servo 3 (no disponible en el SWP estándar, sólo en el SWP Servo)
Las CV 46, 47 y 48 idem para la salida de Servo 4 (no disponible en el SWP estándar, sólo en el SWP Servo)
La CV 50 afecta a todas las salidas de servos a la vez y puede tener valores entre 0 y 7 para corregir el comportamiento de algunos servos convencionales como por ejemplo "temblores" cuando alcanzan la posición final.
Las CV 51 a 54 permiten mapear las salidas de servos para que puedan trabajar en conjunto en diferentes combinaciones.
Las CV 55 y 56 permiten ajustar 2 posiciones adicionales C y D para el servo 1. Las CV 57 y 58 para el servo 2, 59 y 60 para el 3 y 61 y 62 para el servo 4.
Además de las 4 salidas habituales, el SWP estándar dispone de 2 salidas extra para conectar 2 servos que pueden ser accionados como si se trataran de 2 salidas normales. Mediante las CVs correspondientes, cada una de estas 2 salidas puede ser programada variando la velocidad de giro del servo así como los límites de movimiento a izquierda y derecha.
La dirección digital que se programe para los servos es totalmente independiente de la dirección digital que se asigne a las salidas para accesorios electromagnéticos como si de dos decoders distintos se tratara
CVs para el ajuste de los servos:
Las CV 35 y 36 sirven para asignar la dirección digital de las salidas para servos (se asignan 4 salidas por módulo aunque físicamente solo hay 2 en el SWP estándar. En el SWP Servo si existen las 4 salidas para servos). En concreto la CV35 se utiliza para las direcciones cortas(módulos de 4 salidas del 1 al 63) y con la CV36 podemos ampliar el rango y usar direcciones largas (el valor 8 por defecto deshabilita las direcciones largas. Por cada valor de 0 a 7 se activa el siguiente rango de 1 a 63 módulos).
Las CV37, 38 y 39 sirven para ajustar los valores de la salida para Servo 1:
- CV37 regula la velocidad de giro del servo. valores de 1 a 63, el valor multiplicado por 0,25ms da la velocidad de giro
- CV38 Regula el límite de giro de la posición A del servo mediante una duración de pulso que va de 0=1ms a 63=2ms
- CV39 regula el límite de giro de la posición B del servo. idem al anterior
Las CV 43, 44 y 45 idem para la salida de Servo 3 (no disponible en el SWP estándar, sólo en el SWP Servo)
Las CV 46, 47 y 48 idem para la salida de Servo 4 (no disponible en el SWP estándar, sólo en el SWP Servo)
La CV 50 afecta a todas las salidas de servos a la vez y puede tener valores entre 0 y 7 para corregir el comportamiento de algunos servos convencionales como por ejemplo "temblores" cuando alcanzan la posición final.
Las CV 51 a 54 permiten mapear las salidas de servos para que puedan trabajar en conjunto en diferentes combinaciones.
Las CV 55 y 56 permiten ajustar 2 posiciones adicionales C y D para el servo 1. Las CV 57 y 58 para el servo 2, 59 y 60 para el 3 y 61 y 62 para el servo 4.
Forzar Reset de Fábrica
En caso de que necesitemos volver a dejar el Switchpilot con la programación de fábrica y no podamos acceder a las CV para escribir el valor 8 en la CV 8, hay otro método físico que forzará el reset de fábrica realizando los siguientes pasos:
1.- Desconectar la alimentación del Switchpilot
2.- Presionar y mantener pulsado el botón de programación sin soltarlo
3.- Volver a conectar la alimentación del Switchpilot
4.- Soltar el botón de programación
Tras estos pasos el Switchpilot se habrá reinicializado con los valores de fábrica.
En caso de que necesitemos volver a dejar el Switchpilot con la programación de fábrica y no podamos acceder a las CV para escribir el valor 8 en la CV 8, hay otro método físico que forzará el reset de fábrica realizando los siguientes pasos:
1.- Desconectar la alimentación del Switchpilot
2.- Presionar y mantener pulsado el botón de programación sin soltarlo
3.- Volver a conectar la alimentación del Switchpilot
4.- Soltar el botón de programación
Tras estos pasos el Switchpilot se habrá reinicializado con los valores de fábrica.
Otros Decoder ESU para Accesorios

|
SwitchPilot Servo:
Esu también dispone de otro dispositivo denominado "SwitchPilot Servo" que dispone de salidas exclusivamente para servos y que actúan y se programan exactamente igual que el SWP estándar pero con mayor precisión de movimiento de los servos. Además dispone de pulsadores en el propio dispositivo y pads a los que conectar pulsadores externos para comandar los servos analógicamente de modo que este dispositivo puede usarse en digital o en analógico. También dispone de otro conector al que se puede enchufar un SWP Extension lo que permite además con sus relés activar o desactivar circuitos en paralelo con los servos. La versión 2.0 multiprotocolo (ref. 51822), dispone de 4 salidas para conectar y controlar un total de 4 servos. La versión más moderna la 3.0, también multiprotocolo, dispone de 8 salidas de servo y las entradas necesarias para conectar hasta 16 pulsadores para su control analógico. (El precio de un SwitchPilot Servo 3.0 ronda los 55€ lo que lo hace muy atractivo ya que cada salida sale por 7€ más un servo de unos 4€ supone controlar digitalmente un desvío con movimiento lento por sólo 11€.) |
|
SwitchPilot Extension:
ESU dispone de otro dispositivo llamado "SwitchPilot Extension" que puede ser conectado directamente al SWP estándar o servo. Este dispositivo añade un relé de potencia a cada posición de cada una de las salidas (2A a cada posición de cada salida) lo que permite alimentar circuitos que requieren mayor potencia o utilizarlo también para iluminar un panel de control analógico, polarizar desvíos, etc. Cada salida funciona sincronizada con la salida del SWP estándar o con el SWP Servo al que esté conectado. |
